Techniques de Transmission Numérique
Objectifs
- Caractériser les types de modulation numérique d'un signal analogique.
- Choisir un type de modulation pour une application donnée.
- Appliquer le critère de Nyquist pour le choix de la fréquence d'échantillonnage.
- Expliquer le principe de la modulation MIC et ses normes en téléphonie.
- Expliquer la différence entre la modulation Delta et la MIC.
- Comparer les types de modulation utilisés dans les modems.
4.1 Introduction
En transmission, un des problèmes essentiels est d'adapter le signal transmis au support de communication. La transmission en bande de base (sans modulation) utilise le câble coaxial, la paire torsadée ou la fibre optique connue support de transmission pour acheminer les trains d'impulsions. Par contre, la transmission sur canal téléphonique et la transmission à large bande font appel à des techniques de modulation dont nous allons étudier les principaux types.
En premier lieu, nous distinguons deux catégories de modulation impliquant les trains d'impulsions : la modulation numérique d'un signal analogique et la modulation analogique d'un signal numérique.
La première catégorie consiste à varier l'amplitude, la durée ou la position d'un train d'impulsions en fonction de l'amplitude de l'information analogique, ou encore à générer des trains d'impulsions codées.
La deuxième catégorie, utilisée dans les modems ou dans la transmission à large bande, consiste à modifier l'amplitude, la phase ou la fréquence d'une onde porteuse sinusoïdale en fonction du signal binaire transmis.
4.2 Modulation numérique d'un signal analogique
Nous distinguons trois types de modulation numérique ou d'impulsions d'un signal analogique:
La modulation d'impulsions en amplitude (PAM)
- La modulation d'impulsions en durée (PDM)
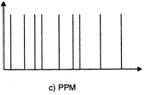
- La modulation d'impulsions en position (PPM)
- Nous comptons également deux types de modulation numérique générant des impulsions codées :
- La modulation par impulsions codées (MIC)
- La modulation Delta.
4.2.1 Modulation d'impulsions en amplitude (PAM)
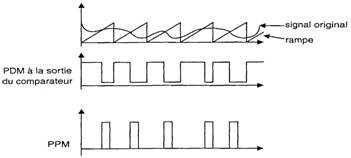
Cette technique de modulation consiste à varier l'amplitude de chaque impulsion en fonction de l'amplitude du signal analogique. La figure 4.1 a) en est une illustration.
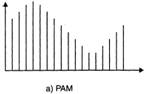
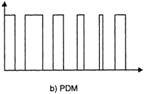
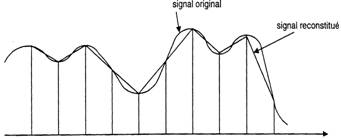
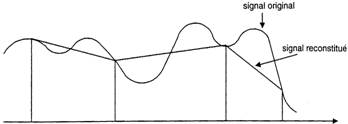
Figure 4.1 : Les trois types de modulation d'impulsions. À la figure 4.2, nous pouvons intuitivement constater qu'il faut un nombre suffisant d'impulsions ou d'échantillons pour reconstituer le signal analogique à la réception.
Figure 4.2 : Effet du taux d'échantillonnage sur la reconstitution de l'information
Selon le critère de Nyquist, le taux minimum d'échantillonnage requis doit être au moins deux fois plus élevé que la bande passante du signal analogique :
fs ³ 2 BW
où : fs = fréquence d'échantillonnage
BW = bande passante du signal analogique
Le schéma bloc d'un modulateur/démodulateur PAM est présenté à la figure 4.3.
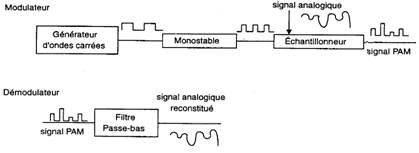
Figure 4.3 : Schéma bloc d'un modulateur/démodulateur PAM.
4.2.2 Modulation d'impulsions en durée (PDM)
La modulation d'impulsions en durée consiste à varier la durée des impulsions en fonction de l'amplitude du signal analogique (figure 4.1.b).
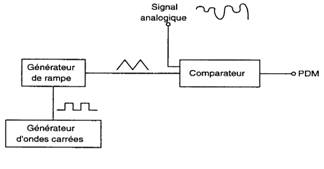
La figure 4.4 illustre le schéma bloc d'un modulateur PDM. Le signal analogique est continuellement comparé à une rampe et le signal PDM est récupéré à la sortie du comparateur. La figure 4.5 montre les formes d'ondes associées.
Figure 4.4 : Schéma bloc d'un modulateur PDM.
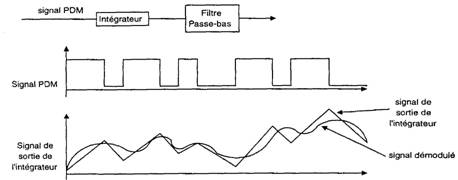
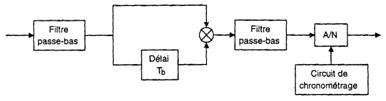
Figure 4.5 : Les formes des ondes associées. Le schéma bloc du démodulateur (récepteur) PDM et les formes d'ondes générées sont illustrés à la figure 4.6. Il s'agit simplement d'un intégrateur suivi d'un filtre passe-bas.
Figure 4.6 : Schéma bloc du démodulateur PDM et les formes d'ondes générées.
4.2.3 Modulation d'impulsions en position (PPM)
La modulation d'impulsions en position (figure 4.1c) consiste à varier les intervalles de temps entre des impulsions identiques en fonction de l'amplitude de l'information analogique. On peut facilement générer un signal modulé en position à partir d'un signal PDM à l'aide d'un simple monostable.
Figure 4-7 : Le schéma bloc d'un modulateur PPM
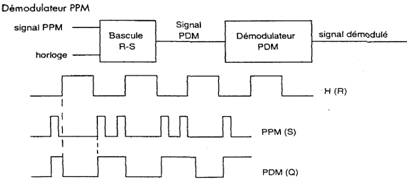
Étant donné que l'information se retrouve dans l'intervalle de temps séparant l'impulsion de l'instant de synchronisation, le démodulateur à la réception doit reconstituer le signal d'horloge afin de retrouver le signal PDM d'origine. Après quoi, on utilise un démodulateur PDM pour extraire l'information analogique (figure 4.8).
Figure 4.8 : Schéma bloc d'un démodulateur PPM et la formes des ondes générées.
4.2.4 Modulation par impulsions codées
La modulation MIC (PCM pour Pulse Code Modulation) est une technique qui consiste à convertir un signal analogique en une série d'impulsions binaires codées.
Ainsi, pour réaliser un système de modulation MIC, trois opérations de base sont indispensables :
- échantillonnage
- quantification
- codage
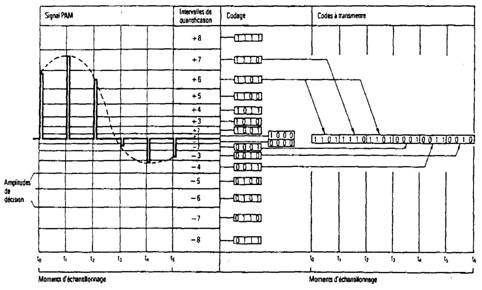
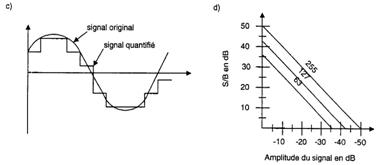
Figure 4.9 : Principe de ce type de modulation. Échantillonnage
Le théorème de l'échantillonnage indique la fréquence minimale à laquelle un signal analogique doit être exploré pour qu'il puisse être rendu dans sa forme initiale à partir des échantillons sans aucune perte d'information. Nous avons vu que la fréquence d'échantillonnage (f,) doit être au moins le double de la bande passante du signal ou de la fréquence la plus élevée contenue dans le signal analogique,
Pour la bande de fréquences de 300 à 3400 Hz utilisée en téléphonie, la fréquence d'échantillonnage a été fixée à 8000 Hz à l'échelle mondiale, Ceci signifie qu'un signal de fréquence vocale est exploré 8000 fois par seconde. L'intervalle entre deux échantillons successifs se calcule comme suit :
Suite au processus d'échantillonnage et d'un point de vue technique, nous obtenons un signal PAM tel que décrit dans le paragraphe 4.2.1.
Quantification
Les impulsions modulées en amplitude (PAM) présentent également une forme analogique du signal. Les échantillons peuvent toutefois mieux être transmis et traités lorsqu'on les convertit en des signaux de forme numérique. Le premier pas à faire pour convertir le signal PAM en un signal numérique - dans notre cas, un signal modulé par impulsions codées MIC est la quantification. Pour ce faire, il y a lieu de diviser toute la gamme des valeurs possibles entre des intervalles de quantification.
Pour bien comprendre le principe de la quantification, seuls 16 intervalles de quantification de même grandeur sont représentés à la figure 4.9. Ces intervalles sont désignés dans la partie positive du signal par +1 à +8, et dans la partie négative par -1 à -8, Pour chaque échantillon, on détermine l'intervalle de quantification auquel il correspond. À chaque fois, un décalage peut se produire entre la valeur de l'échantillon et le niveau de quantification correspondant.
Codage
Enfin, l'intervalle de quantification correspondant à un échantillon du signal est converti en un code binaire qui peut être transmis sous forme d'impulsions codées.
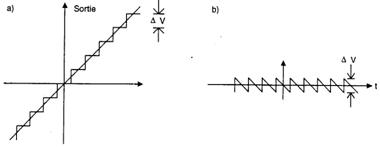
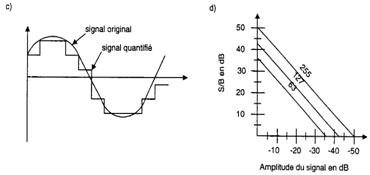
Quantification uniforme et bruit de quantification
La quantification uniforme emploie un pas de quantification fixe (figure 4.10a). En comparant à chaque instant le signal sous forme d'escalier représentant les pas de quantification et le signal idéal signe droite), on obtient la forme d'onde de la figure 4.10b montrant l'erreur ou le bruit de quantification à chaque instant. Ce bruit de quantification est d'autant plus faible que le nombre d'intervalles de quantification disponibles est plus grand; ce qui signifie un nombre plus grand de bits pour représenter chaque échantillon. La figure 4.10c illustre un signal original et le signal quantifié correspondant. Enfin, le rapport signal à bruit en fonction de l'amplitude du signal et du nombre de pas de quantification est illustré à la figure 4.10d.
Figure 4.10 : Les illustrations des signaux et de leurs signaux quantifiés.
Dans le cas d'une quantification uniforme, le pas de quantification est donné par la formule :
où: Vmax = la valeur crête du signal d'entrée,
N = le nombre de bits par échantillon
La valeur crête de l'erreur de quantification VN est alors de :
où Vn = la tension crête du bruit de quantification
Étant donné que la forme d'onde de ce bruit est triangulaire, on peut calculer la valeur efficace comme suit :
La puissance du bruit mesurée aux bornes d'une résistance normalisée de 1 W est donnée par :
En l'absence du signal d'entrée, il est possible que le bruit généré par les composantes électroniques et dû à l'agitation thermique des électrons (bruit gaussien) soit codé par le codeur MIC. Pour éliminer ce bruit, on fait en sorte que le premier pas de quantification dépasse la tension maximale du bruit.
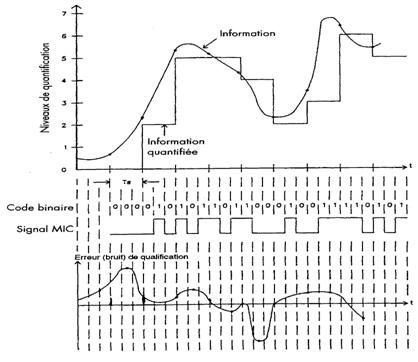
La quantification uniforme joue en faveur des signaux forts. Alors, le rapport signal à bruit est plus élevé pour un signal fort et moins élevé pour un signal faible. Ainsi, le système n'offre pas la même performance pour les différents niveaux du signal d'entrée. Cette situation est résumée par la figure 4.12. La figure 4.11 illustre le schéma d'un système MIC comportant le codeur et le décodeur.
Figure 4.11 : Schéma d'un signal échantillonné et quantifié puis codé MIC.
Figure 4.12 : Schéma bloc d'un système MIC comportant un codeur et un décodeur.
Un signal analogique de l0V maximum est codé par un système MIC à 4 bits. Calculer la puissance du bruit de quantification et le rapport signal à bruit.
Solution. De l'équation 4.2,
en supposant que pour un signal acoustique la valeur maximum du signal est égale à sa valeur efficace, le rapport signal à bruit sera égal à :
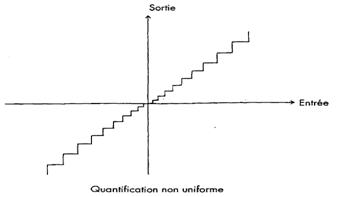
Quantification non uniforme
Nous avons vu que dans le cas de la quantification uniforme, le rapport signal à bruit joue en faveur des signaux forts. En pratique, les signaux faibles sont plus fréquents que les signaux forts. En plus, lorsqu'il y a des moments de silence, il est souhaitable que la sortie soit nulle.
Pour arriver à un rapport signal à bruit constant, indépendamment du niveau du signal, un système MIC peut utiliser la technique de quantification non uniforme qui fait en sorte qu'on assigne plus de pas de quantification aux signaux faibles qu'aux signa27-Avr-2008fy;'>Lois de compression et d'expansion
Le même effet que celui de la quantification non uniforme peut être obtenu avec la compression du signal par le codeur et avec l'expansion du signal par le décodeur. Deux lois de compression, l'une utilisée en Amérique du Nord Loi m) et l'autre européenne Loi A), sont employées en téléphonie là où on utilise la modulation MIC.
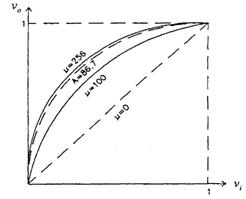
La loi m est donnée par la formule :
où V0 = Tension instantanée du signal compressé
vi = Valeur instantanée du signal d'entrée
m = Paramètre de compression
Vm = Tension crête du signal d'entrée
Figure 4.13 : Quantification non uniforme.
Pour un signal normalisé (V. = 1), la même expression peut être écrite comme suit :
Les fonctions de transfert entre le signal d'entrée et le signal de sortie compressé pour différentes valeurs de m sont données à la figure 4.14 où l'on voit l'évolution de chaque courbe avec le paramètre de compression. Seules les tensions positives sont représentées puisque les tensions négatives sont traitées de la même façon.
Figure 4.14 : Les fonctions de transfert entre le signal d'entrée et le signal de sortie compressé pour différentes valeurs de m
La loi A est donnée par la formule :
Les mêmes expressions en valeurs normalisées (Vm = 1) peuvent s'exprimer comme suit :
A étant le paramètre de compression.
En examinant les courbes de la figure 4.14, on remarque que la courbe est linéaire pour les petites valeurs de v, et logarithmique pour les grandes valeurs de vi. En téléphonie, comme nous l'avons mentionné auparavant, les signaux faibles sont plus fréquents que les signaux forts, d'où l'importance de la linéarité de la courbe de compression pour les signaux faibles. Pour les signaux faibles, la loi A est parfaitement linéaire, tandis que la loi m assure une courbe approximativement linéaire.
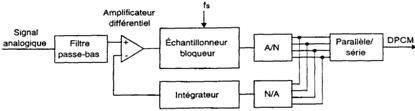
4.2.5 Modulation MIC différentielle (DPCM)
Nous avons vu que dans un système MIC, chaque échantillon du signal est quantifié et codé. Or, il arrive souvent que le changement de niveau d'un échantillon à l'autre soit petit et, de ce fait, il est avantageux de coder uniquement la différence entre deux échantillons successifs.
Les schémas bloc d'un codeur MIC différentiel et d'un décodeur MIC différentiel sont donnés aux figures 4.15.a. et 4.15.b. On voit, qu'au moment de l'échantillonnage, une tension proportionnelle à la différence entre le signal d'entrée filtré et un autre signal analogique généré à partir de la valeur numérique de l'échantillon précédent est présente à l'entrée de l'échantillonneur-bloqueur. Cette différence sera ensuite quantifiée et codée. En pratique la MIC différentielle offre la même performance avec un code à 4 bits que le PCM avec un code à 8 bits, nécessitant deux fois moins de bande passante pour transporter efficacement le signal codé.
Figure 4-15-a : Schéma bloc d'un codeur MIC différentiel.
Figure 4-15-b : Schéma bloc d'un décodeur MIC différentiel. Exemple 4.2
En téléphonie, la bande passante du signal analogique est limitée à 4 kHz. Le système MIC standard échantillonne à une fréquence de 8 kHz et un code à 8 bits est utilisé. Déterminer le débit binaire du signal MIC et celui du MIC différentiel.
Solution:
a) pour un signal MIC :
8000 échantillons par seconde x 8 bits = 64 kbps
b) pour un signal MIC différentiel :
8000 x 4 bits = 32 kbps
4.2.6 Modulation Delta (DM)
Le système de modulation MIC est complexe et coûteux en terme de bande passante capable de transiter un signal numérique à 64 kbps. La MIC différentielle diminue le débit binaire sans pour autant réduire la complexité du système.
La modulation Delta, qui peut être considérée comme un cas particulier de la MIC différentielle, représente une amélioration par rapport aux deux techniques précédentes, réduisant à la fois le taux binaire et la complexité du système.
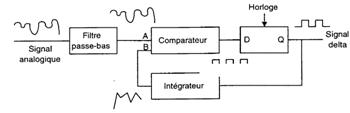
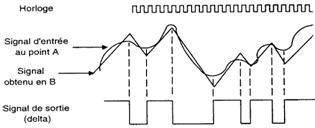
Au lieu de coder la valeur de chaque échantillon ou la différence entre deux échantillons successifs, la modulation Delta code uniquement le sens d'évolution (ou la dérivée) du signal analogique et transmet un seul bit par échantillon. La synchronisation sera alors plus simple et la réalisation matérielle moins complexe. Un modulateur Delta linéaire est représenté à la figure 4.16. Le signal binaire obtenu à la sortie est semblable à celui obtenu par un modulateur d'impulsions en durée (PDM).
Figure 4.16.a : Schéma bloc d'un modulateur Delta linéaire.
Figure 4.16.b : Illustration des signaux modulés Delta.
Un démodulateur Delta se construit facilement à l'aide d'un intégrateur et d'un filtre passe-bas comme le démontre le schéma bloc illustré à la figure 4.17.
Figure 4.17 : Schéma bloc d'un démodulateur Delta.
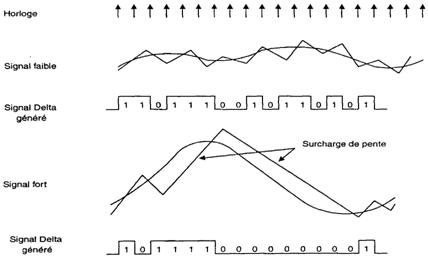
Le système Delta linéaire utilise un intégrateur à gain constant: lorsque la pente de la rampe est insuffisante pour suivre les variations du signal d'entrée, une distorsion appelée surcharge (overtoad) se produit. L'effet de surcharge est illustré à la figure 4.18 où l'on compare la performance d'un système Delta pour un signal faible et un signal fort.
Figure 4.18 : Illustration de l'effet de surcharge.
Il est possible de diminuer la surcharge en utilisant un intégrateur à pente variable. Il s'agit de varier la pente de l'intégrateur en fonction des variations du signal d'entrée d'où l'appellation modulation Delta à pente continuellement variable ou CVSDM (Continuously Variable Slope Delta Modulation).
4.2.7 Modulation Delta adaptative ou à pente continuellement variable (CVSDM)
Le principe de la CVSDM est assez simple: on mémorise dans un registre quelques bits (3 ou 4) de sortie du codeur pour prévoir la situation de surcharge et ainsi augmenter ou diminuer la pente de l'intégrateur. Donc, la pente s'ajuste constamment pour réduire l'erreur entre la sortie de l'intégrateur et le signal original. Le tableau 4.1 décrit un algorithme de décision pour un registre à 4 bits.
valeur des bits
État
Décision
0000 ou 1111
surcharge
augmentation forte
0001 ou 1l10
Surcharge en régression
diminution
0010 ou 1101
surcharge en régression
diminution faible
0011 ou 1100
surcharge faible
augmentation
0100 ou 1011
surcharge faible
augmentation faible
0101 ou 1010
normal
diminution faible
0111 ou 1000
début surcharge
augmentation
Tableau 4.1 : Description d'un algorithme de décision pour un registre à 4 bits.
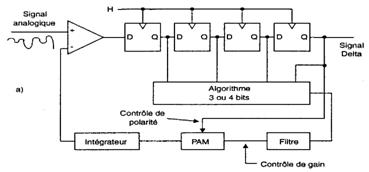
Le schéma bloc d'un modulateur CVSDM apparaît à la figure 4.19a. Le modulateur contient les trois blocs de base d'un modulateur Delta linéaire: le comparateur, l'échantillonneur et l'intégrateur. La sortie du comparateur indique le signe de la différence entre la tension analogique et celle de la sortie de l'intégrateur. Ce bit de signe contrôle également la direction de la rampe de l'intégrateur. Un algorithme évalue les 3 ou 4 derniers bits se trouvant dans un registre à décalage. Lorsque tous les bits sont à «1» ou à «0», une «coïncidence» se produit indiquant que le gain de l'intégrateur est trop faible (surcharge).
La sortie du circuit réalisant cet algorithme est filtrée et ensuite appliquée à l'entrée du modulateur d'impulsions en amplitude dont les impulsions de sortie contrôlent le gain de l'intégrateur et le sens de la rampe l(e signe).
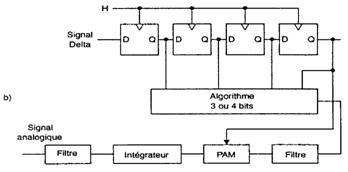
Le même algorithme se répète dans le récepteur (décodeur) dont le schéma bloc est illustré à la figure 4.19b.
La modulation Delta adaptative offre, à un taux binaire de 32 Kbps, une performance analogue à la modulation MIC avec un taux binaire de 64 Kbps. La reconnaissance de la voix essentielle en téléphonie, est possible à 16 Kbps et la compréhension est assurée à 9600 bps. En plus, le système est moins sensible aux erreurs que la MIC.
Figure 4.19.a : Schéma bloc d'un modulateur CVSDM
Figure 4.19.b : Schéma bloc d'un décodeur CVSDM
Le tableau 4.2 compare deux types de modulation: MIC et Delta.
Caractéristiques
Delta
MIC (PCM)
Caractères de synchronisation nécessaires
non
oui
Tolérance aux erreurs
bonne
médiocre
Rapport signal à bruit
plus élevé
moins élevé
Types de filtres utilisés
simples
complexes
Importance d'une erreur dans la
transmission du bit le plus significatif
moins
importante
plus
importante
Adaptation aux systèmes numériques existants
médiocre
très bonne
Tableau 4.2 : Comparaison entre les deux types de modulations MIC et Delta.
4.3 Modulation analogique des signaux numériques
Les supports de transmission traditionnels ont été conçus pour transmettre un signal analogique. En particulier, la bande passante efficace du circuit téléphonique est de 3 kHz et l'existence des transformateurs entre l'abonné et la centrale téléphonique rend l'acheminement d'un train d'impulsions sur ce circuit pratiquement impossible. Ainsi, plusieurs techniques de modulation ont été développées pour pouvoir transmettre un signal numérique utilisant une porteuse analogique. Ces mêmes techniques sont utilisées dans la transmission à large bande utilisant le multiplexage par répartition de fréquence (FDM) pour partager le support de communication entre plusieurs signaux.
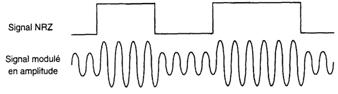
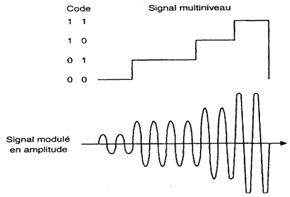
La figure 4.20 illustre le processus de modulation en amplitude. L'amplitude d'un signal sinusoïdal varie entre deux amplitudes selon que le signal numérique est à «0» ou à «1».
Figure 4.20 : Illustration du processus de modulation en amplitude.
Plusieurs niveaux d'amplitudes du signal AM peuvent être générés si l'information numérique est codée sur plusieurs niveaux de tension. La figure 4.21 illustre ce processus.
Figure 4.21 : Illustration du processus de modulation en amplitude à plusieurs niveaux.
4.3.1 Modulation par déplacement d'amplitude (ASK)
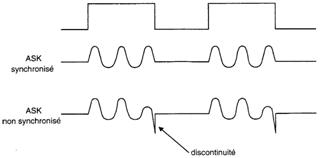
Ici le niveau «0» est codé par une absence du signal sinusoïdal et le niveau «1» par sa présence (figure 4.22).
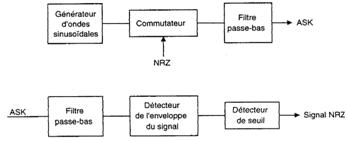
Figure 4.22 : Illustration du processus de modulation ASK. Le schéma bloc d'un modulateur et d'un démodulateur ASK est illustré dans la figure 4.23.
Figure 4.23 : Schéma bloc d'un modulateur et démodulateur ASK.
En cas de discontinuité dans le signal ASK, une bande passante plus large du canal est requise. Le code MORSE transmis par les amateurs sous forme d'impulsions RF est un exemple de la modulation ASK.
4.3.2Modulation par déplacement de fréquence (FSK)
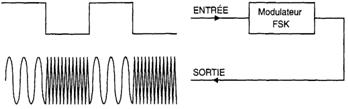
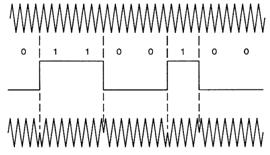
Cette technique de modulation est un cas particulier de la modulation en fréquence. À la sortie du modulateur, un signal sinusoïdal oscille entre deux fréquences selon que le signal binaire est à «0» ou à «1» (figure 4.24).
Figure 4.24 : Illustration du processus de modulation FSK.
Il est possible de générer un signal FSK en utilisant un oscillateur commandé par une tension (VCO), mais un tel circuit utilisé avec succès pour générer un signal FM avec une onde modulante analogique ne peut satisfaire les exigences nées à la transmission de données où l'onde modulante est le signal binaire. Un modulateur FSK doit satisfaire aux exigences suivantes:
- stabilité de la fréquence de sortie correspondant au niveau «0» pour toutes les tensions d'entrées représentant le niveau «0», et stabilité de la fréquence de sortie correspondant au niveau «1» pour toutes les tensions représentant le niveau «1»;
- possibilité d'ajuster chacune des fréquences indépendamment de l'autre.
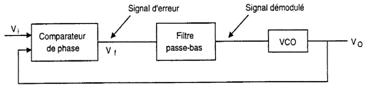
Un circuit à verrouillage de phase (PLL: Phase Locked Loop), couramment utilisé pour démoduler un signal modulé en fréquence, peut être utilisé pour démoduler un signal FSK et reconstituer l'information binaire.
Un tel circuit est composé essentiellement de trois blocs principaux: un comparateur de phase, un filtre passe-bas et un oscillateur commandé par une tension (figure 4.25).
Figure 4.25 : Schéma bloc d'un démodulateur FSK.
Le signal d'erreur dépend de la différence entre la phase du signal d'entrée (vi) et celle du signal de sortie (v0). On peut exprimer vi et v0 comme suit :
Le comparateur de phase pouvant être considéré comme un multiplicateur à sa sortie, on obtient :
K étant le gain du multiplicateur.
Sachant que :
l'équation (4.12) va contenir alors la somme et la différence de fi et f,, puisque la composante qui contient la somme sera filtrée par le filtre passe-bas. À la sortie du filtre, on obtient :
Le signal d'erreur vf commande la fréquence de sortie de l'oscillateur et tend à la rapprocher de la fréquence du signal d'entrée. Ce processus, qui se produit en boucle fermée, se poursuit jusqu'à ce que les deux fréquences deviennent égales, L'équation 4.13 devient alors :
Cette équation, où (
) est la différence de phase ou l'erreur de phase entre les deux signaux, représente la tension qui doit être maintenue à l'entrée de l'oscillateur pour que la boucle reste verrouillée.
Trois paramètres importants sont à considérer lors de la mise au point d'un circuit PLL (figure 4.26) :
fo = la fréquence d'oscillation libre de l'oscillateur VCO.
Dfc = la gamme de capture: gamme de fréquences pour lesquelles l'oscillateur suit instantanément les changements de fréquence à l'entrée du circuit,
Df1, = la gamme de verrouillage : gamme de fréquences pour lesquelles l'oscillateur se verrouille sur la phase de référence.
Figure 4.26 : Les 3 paramètres importants à considérer lors de la mise au point d'un circuit PLL.
Le rôle du filtre passe-bas dans une boucle à verrouillage de phase est de supprimer le bruit et les composantes haute fréquence et de fournir un niveau continu qui commande la fréquence de l'oscillateur.
Dans le cas du signal FSK où deux fréquences seulement sont présentes, le signal d'erreur va avoir également deux valeurs distinctes de tension, d'où la possibilité de reconstituer le signal binaire d'origine à la sortie du filtre passe-bas. Le schéma bloc d'un démodulateur FSK est illustré à la figure 4.27.
Figure 4.27 : Schéma bloc d'un démodulateur FSK.
4.3.3 Modulation par déplacement de phase (PSK)
Ce type de modulation consistant à changer la phase d'une porteuse sinusoïdale au moment où le signal binaire change de niveau est la méthode la plus efficace pour la transmission de données à travers un canal analogique. Le principe de base de la modulation PSK est illustré à la figure 4.28.
Figure 4.28 : Principe de base de la modulation PSK
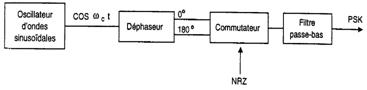
Un émetteur (modulateur) PSK de base peut être réalisé avec un oscillateur et un inverseur de phase de 180°. Lorsque le signal binaire est à l'état «1», on retrouve à la sortie du modulateur le signal de l'oscillateur. Lorsque le signal binaire passe à l'état «0», on retrouve le signal déphasé de 180° comme illustré au schéma bloc de la figure 4.29.
Figure 4.29 : Schéma bloc d'un modulateur PSK.
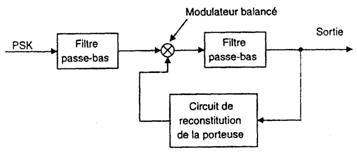
Un récepteur (démodulateur) PSK du type présenté à la figure 4.30 doit être cohérent. Ce qui veut dire qu'à la réception, une réplique parfaite de la porteuse en fréquence et en phase est générée. Nous avons alors, à la sortie du modulateur balancé, l'expression :
Le signal contenant 2wc, sera filtré par le filtre passe-bas. À la sortie du démodulateur, on obtient :
Pour q=0°
Pour q=180°
L'information binaire est reconstituée.
Figure 4.30 : Schéma bloc d'un démodulateur PSK.
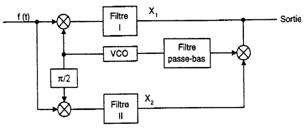
La seule ambiguïté Pouvant se produire est due au fait que la porteuse générée peut correspondre à une phase ou à une autre. Pour régénérer la porteuse et décoder l'information binaire, la méthode appelée boucle de Costas s'avère plus efficace (figure 4.3 1).
Figure 4.31 : Schéma bloc d'une boucle de Costas utilisée dans un démodulateur PSK.
Le signal PSK, à l'entrée de la boucle de Costas, peut être exprimé par l'équation :

où d(t) représente les données et sa valeur est ±l.
Pour simplifier l'analyse, on suppose que la boucle est verrouillée et qu'à la sortie du VCO, on a :
Sachant que :
le produit de f1 et f2 nous donne :
Le filtre passe-bas 1 est conçu pour éliminer les termes contenant deux fois la fréquence d'entrée et seule l'expression :
se trouve à sa sortie et en conséquence à la sortie de la boucle.
La sortie du VCO (
est maintenant déphasée de 90° avant d'être appliquée à l'une des entrées du multiplicateur où f1(t) est également appliqué à J'autre entrée.
On a alors comme produit à l'entrée du filtre passe-bas :
Le filtre 2 élimine le terme contenant deux fois la fréquence d'entrée. À sa sortie, on obtient :
Le signal d'erreur qui commande le VCO est le produit de X1 (t) et X2(t). On a alors :
La différence entre le signal d'erreur ef et celui d'une boucle PLL classique réside dans le terme
. Si la différence de phase est de 0° ou 180°, ef est nul et la boucle se verrouille avec l'oscillateur VCO à deux angles différents par rapport à la phase du signal d'entrée. Selon la figure 4.31, les données sont disponibles à la sortie du filtre passe-bas sous la forme suivante :
La différence de phase
et
où d(t) représente toujours l'information binaire.
Le signal d'erreur :
est nul pour
= 0° ou 180°.
Pourtant, la boucle de Costas n'élimine pas la possibilité d'une erreur permanente de 180'. Heureusement, cette erreur de phase peut être éliminée en insérant un encodeur différentiel dans l'émetteur et un décodeur différentiel dans le récepteur.
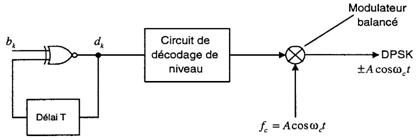
La figure 4.32 illustre le principe de l'encodeur différentiel (DPSK).
Figure 4.321 : Schéma de principe de l'encodeur différentiel DPSK.
Dans le processus du codage, le bit codé différentiellement dk, le bit présent à l'entrée bk, et le bit précédent dk-1 Sont comparés. La valeur de dk est «1» si bk et dk-1 ont le même niveau logique; autrement, dk serait égal à «0». La comparaison se réalise avec la fonction logique OU- inclusif :

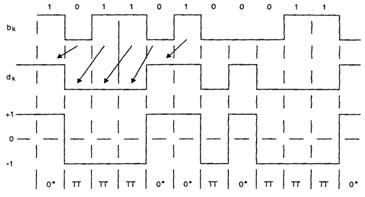
Le circuit de décodage de niveau fournit +1 ou -1 selon la valeur logique de bk et, à la sortie du multiplicateur, on obtient le signal DPSK. La figure 4.33 illustre les formes d'ondes générées en supposant que l'état initial de dk est 1.
Figure 4.33 : Illustration des formes d'ondes générés par un encodeur différentiel DPSK Le décodeur DPSK Compare la phase du signal modulé pendant l'intervalle de temps présent avec la phase du signal pendant l'intervalle de temps précédent pour détecter le changement de phase et reproduire l'information binaire. Si les deux phases sont identiques, un niveau logique «1» est généré; autrement, c'est le niveau «0». En se référant aux phases générées à partir de la suite binaire de la figure 4.33, on retrouve à la sortie du décodeur la suite binaire bk. Le schéma du décodeur DPSK apparaît dans la figure 4.34.
Figure 4.34 : Schéma bloc du décodeur DPSK.
Modulation de phase en quadrature
Ce type de modulation est utilisé pour doubler le débit binaire d'un canal de communication sans modifier l'occupation spectrale du signal. Chaque état de phase représente deux bits à la fois (tableau 4.3).
Valeur du débit
Changement de phase
Signal transmis
A
B
1
1
+ 45°
cos(wct + 45°)
0
1
+ 135°
cos(wct + 135°)
0
0
+ 225° (-135)°
cos(wct + 225°)
1
0
+ 315° (-45)°
cos(wct +315°)
Tableau 4.3 : Les états de phase de la modulation en quadrature.
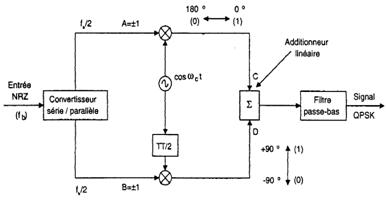
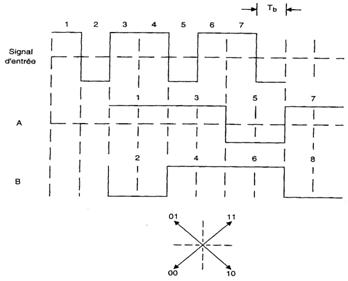
Un modulateur de phase en quadrature apparaît à la figure 4.35. La figure 4.36 illustre la génération des signaux aux points A et B du modulateur.
Figure 4.35 : Schéma bloc d'un modulateur de phase en quadrature.
Le convertisseur série-parallèle convertit le signal binaire NRZ en deux signaux binaires parallèles dont le débit binaire est égal à la moitié de celui du signal d'entrée.
Le signal en A est multiplié par l'onde porteuse, tandis que le signal en B est multiplié par la même onde porteuse, déphasée cependant de 90°. Les signaux en A et B ont des valeurs normalisées de +1 ou de -1. Cette multiplication de l'onde porteuse par «1» ne modifie pas la phase de cette dernière. Maintenant, si le niveau logique «0» (correspondant à la valeur normalisée -1) est multiplié par l'onde porteuse, un déphasage de 180° se produit. Au point B, une situation analogique se reproduit, sauf que l'onde porteuse est déphasée de 90° avant d'être appliquée au multiplicateur. Les vecteurs aux points C et D sont additionnés par un additionneur linéaire et on obtient, après l'addition, le signal QPSK.
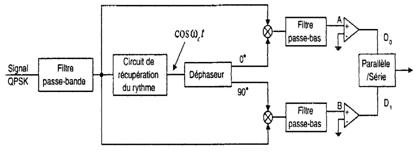
Figure 4.36 : Illustration de la génération des signaux aux points A et B du modulateur de phase en quadrature. Le diagramme bloc d'un démodulateur QPSK apparaît à la figure 4.37. Le filtre passe-bande à l'entrée élimine certaines composantes du bruit et les interférences des canaux adjacents, L'onde modulée est dirigée dans deux voies différentes (A et B) et en même temps vers le circuit de récupération de la porteuse - ce qui est essentiel pour obtenir une onde porteuse capable de suivre les variations en fréquence et en phase de l'onde modulée. La porteuse récupérée passe par un déphaseur qui fournit un déphasage de 0° et un autre de 90°. La démodulation cohérente est le processus inverse de la modulation; autrement dit, les signaux modulés A et B sont multipliés par l'onde porteuse sans et avec déphasage de 90°. La multiplication se fait par un mélangeur balancé. Les filtres passe-bas éliminent le deuxième harmonique et les harmoniques supérieurs. Les signaux générés aux points A et B et à la sortie sont donnés au tableau 4.4.
Figure 4.37 : Schéma bloc d'un démodulateur QPSK.
Phase du signal reçu
Sortie A
Sortie B
Sortie de données
Dl
D0
45°
½cos45°=0,35
½cos(-45°)=0,35
1
1
135°
½cos135°=-0,35
½cos45°=0,35
1
0
225°
½cos225°=-0,35
½cos135°=-0,35
0
0
315°
½cos315°=0,35
½cos225°=0,35
0
1
Tableau 4.4 : Les signaux générés aux points A et B et à la sortie.
Circuit de récupération du rythme
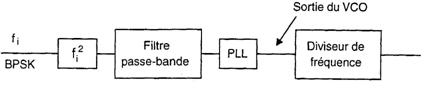
Nous avons vu que plusieurs techniques de modulation nécessitent à la réception une réplique parfaite de la porteuse à la réception. Il faut alors, à partir du signal modulé reçu, régénérer cette porteuse pour pouvoir décoder correctement le signal reçu. Nous avons étudié comment la boucle de Costas régénère la porteuse. Une autre méthode plus simple est donnée à la figure 4.38 pour un signal PSK à deux phases (BPSK).
Figure 4.38 : Schéma bloc du processus de récupération du rythme.
Si le signal reçu est du type ±sinwct à l'entrée du filtre passe- bande, on obtient :
La composante continue est filtrée par le filtre passe-bande et seulement le terme 1cos2wct se trouve à l'entrée du circuit à verrouillage de phase (PLL) où la sortie de l'oscillateur commandé par une tension VCO va se verrouiller sur la fréquence du signal se trouvant à son entrée qui contient deux fois la fréquence de la porteuse. Enfin, un diviseur de fréquence par deux fournit une réplique de la porteuse du signal modulé.
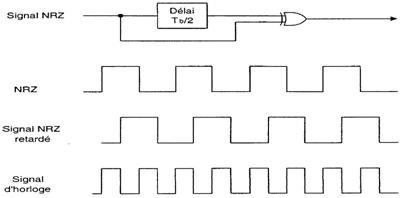
Circuit de récupération de l'horloge
Les systèmes numériques synchrones nécessitent que les deux horloges (à l'émission et à la réception) soient synchronisées. Une façon d'assurer cette synchronisation est de transmettre la suite 1 0 1 0 1 0 1 0 1 0 et de générer un signal d'horloge qui servira à synchroniser l'horloge du récepteur (figure 4.39).
Figure 4.39 : Circuit de récupération d'horloge.
Efficacité d'utilisation de la bande passante
Également appelée densité d'information et exprimée en bit par seconde par hertz, elle sert à comparer la performance d'une technique de modulation par rapport à une autre. Elle est définie comme le rapport du taux binaire à la bande passante minimale nécessaire.
Le tableau 4.5 résume quelques valeurs de cette efficacité pour plusieurs techniques de modulation.
Type de modulation
Taux binaire en Mbps
Bande passante en MHz
Efficacité en bps/Hz
BPSK
10
10
1
QPSK
10
5
2
1 6 QAM
10
2.5
4
Tableau 4.5 : L'efficacité pour plusieurs techniques de modulation.