Les interruptions du microprocesseur
I ) Introduction :
Un système à base de microprocesseur peut comporter plusieurs périphériques tels que : un Ecran, une souris, une imprimante, un disque dure, un CNA (convertisseur numérique analogique), un CAN etc ..
Pour dialoguer avec ces périphériques le microprocesseur a trois façons de communiquer avec ces derniers :
- En questionnant de façon continue le périphérique pour vérifier que des données peuvent être lues ou écrites (Polling).
- En l'interrompant lorsqu'un périphérique est prêt à lire ou écrire des données (interruption)
- En établissant une communication directe entre deux périphériques (DMA : Direct memory acces).
I-1/ Le polling :
Bien que le polling soit une façon simple d'accéder à un périphérique , le débit des données dans un périphérique est parfois beaucoup plus lent que la vitesse de fonctionnement d'un processeur , et le polling peut donc être très inefficace . On lui préfère en général la méthode par interruptions.
I-2 ) Le DMA :
En cas de transfert de données de grande quantité entre deux périphériques, il peut être plus efficace de laisser communiquer entre eux les deux périphériques plutôt que de solliciter le processeur. Ce type de communication avec les entrées/sorties s'appelle gestion de transfert par DMA, Le processeur indique au contrôleur de DMA quels sont les périphériques qui doivent communiquer, le nombre et éventuellement l'adresse des données à transférer, puis il initie le transfert. Le processeur n'est pas sollicité durant le transfert, et une interruption signale au processeur la fin du transfert.
I-3 ) L'interruption :
Il arrive fréquemment qu'un périphérique ou un programme nécessite une intervention du microprocesseur à cet effet il est possible de l'interrompre quelques instants, celui-ci va effectuer l'instruction demandée, est exécuter, une fois qu'elle rend le travail initial.
Ce mode d'échange est principalement basé sur l'initiative du périphérique. Grâce à ce mécanisme d'interruption, le dispositif périphérique prend l'initiative de l'échange.
Une interruption est un évènement qui provoque l'arrêt du programme en cours et provoque le branchement du microprocesseur à un sous- programme particulier dit de "traitement de l'interruption".
Remarque 1 : (ordre de priorité)
Lorsque un périphérique reçoit des données pour le processeur, il envoie au processeur un signal d'interruption. Si celui-ci peut être interrompu ( à condition qu'il ne soit pas en train de communiquer avec un périphérique de plus haute priorité) , il stoppe la tâche en cours , sauve son état ( ces registres) en mémoire (la zone pile ) et appelle la routine correspondant au numéro d'interruption .
Remarque 2 : (plusieurs interruptions):
Le fonctionnement des périphériques se fait en général d'une manière asynchrone, donc plusieurs interruptions peuvent être déclenchées en même temps, il existe souvent un contrôleur d'interruptions destiné à gérer les conflits entre interruptions
II ) Interruption matérielle et logicielle :
II-1 ) Interruption Matériel :
II-1-1 ) Introduction
Une interruption est signalée au processeur par un signal électrique sur une borne spéciale. Lors de la réception de ce signal, le processeur (traite) l'interruption dès la fin de l'instruction qu'il était en train d'exécuter. Le traitement de l'interruption consiste soit :
- à l'ignorer et passer normalement à l'instruction suivante : c'est possible uniquement pour certaines interruptions, nommées interruptions masquables. Il est en effet parfois nécessaire de pouvoir ignorer les interruptions pendant un certains temps, pour effectuer des traitements très urgents par exemple. Lorsque le traitement est terminé, le processeur démasque les interruptions et les prend alors en compte.
- à exécuter un traitant d'interruption (interrupt handler). Un traitant d'interruption est un programme qui est appelé automatiquement lorsqu'une interruption survient. L'adresse de début du traitant est donnée par la table des vecteurs d'interruptions (voir paragraphe suivant ) . Lorsque le (programme d'interruption) traitant a effectué son travail, il exécute l'instruction spéciale IRET qui permet de reprendre l'exécution à l'endroit où elle avait été interrompue.
II-1-2 ) Cas du processeur 8086 :
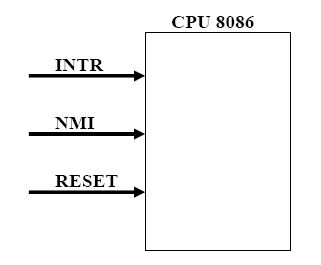
Le microprocesseur 8086 possède trois lignes principales d'interruption : INTR, NMI, et RESET
Ces trois entrées permettent l'arrivée d'une demande (interruption externe) extérieur.
Remarque : Contrôleur d'interruptions dans un PC
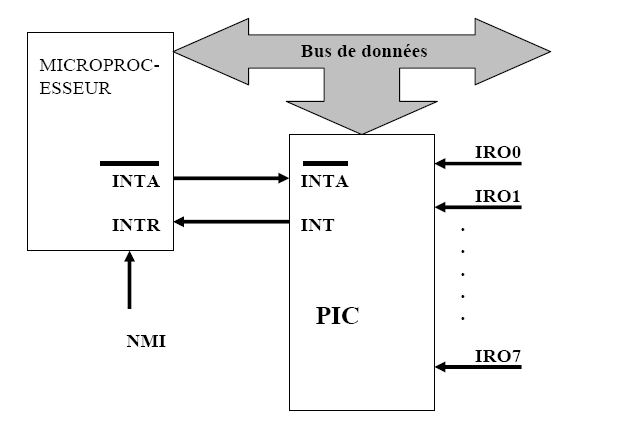
L'ordinateur est relié à plusieurs périphériques, mais nous venons de voir qu'il n'y avait qu'un seul signal de demande d'interruption, INTR. Le contrôleur d'interruptions est un circuit spécial, extérieur au processeur, dont le rôle est de distribuer et de mettre en attente les demandes d'interruptions provenant des différents périphériques.
Le contrôleur d'interruptions (PIC : Programmable Interruption Controler)
La figure précédente indique les connexions entre le microprocesseur et le contrôleur d'interruptions.
Le contrôleur est relié aux interfaces gérant les périphériques par les bornes IRQ (InteRrupt reQuest). Il gère les demandes d'interruption envoyées par les périphériques, de façon à les envoyer une par une au processeur (via INTR). Il est possible de programmer le contrôleur pour affecter des priorités différentes à chaque périphérique. Avant d'envoyer l'interruption suivante, le contrôleur attend d'avoir reçu le signal INTA, indiquant que le processeur a bien traité l'interruption en cours.
A ) NMI : (No masquable interrupt )
Une interruption est dite non masquable signifie qu'elle doit toujours être reconnue par le microprocesseur dés que le signal électrique a été déclenché.
Remarque :
La reconnaissance de l'interruption NMI est généralement à la fin du cycle de l'instruction en cours, or les instructions du 8086 peuvent exiger un temps d'exécution plus ou moins long selon le nombre de cycles machines (comme l'instruction de multiplication) donc le temps de réponse va dépendre de l'instruction en cours. Ce temps est appelé temps de prise en charge de l'interruption.
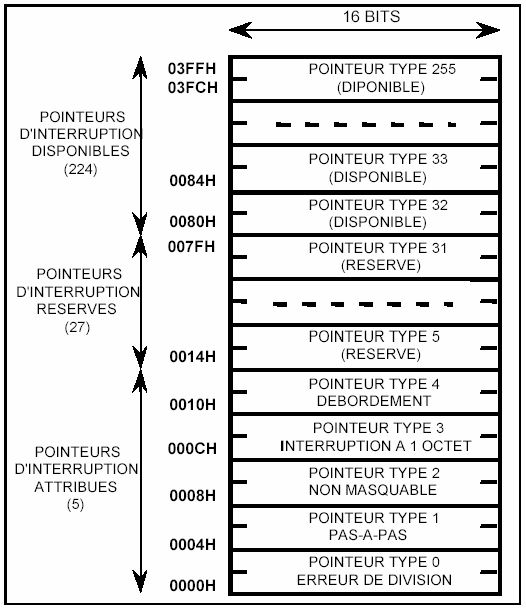
Pendant la demande d'une interruption NMI tous les indicateurs sont empilés pour sauvegarder leurs valeurs en cours, puis l'indicateur IF (indicateur d'autorisation d'interruption : Interruption Flag) est mis à zéro (ce qui interdit toute arrivée de demande d'interruption sur la ligne INTR. Ensuite l'indicateur TF est mis à zéro (Trap Flag : indicateur pas à pas), puis le microprocesseur empile les registres CS et IP dans la pile. Enfin le microprocesseur charge le registre IP avec la valeur à 16 bits qui se trouve à l'adresse mémoire 00008H dans le vecteur d'interruption (voir figure suivante), et le registre CS sera ensuite chargé avec la valeur de 16 bits située à l'adresse 0000AH, donc le microprocesseur maintenant pointe sur le programme d'interruption qu'il va exécuter puis revenir à son programme principal.
Remarque : (Le vecteur d'interruption)
Nommer aussi table d'interruption, il contient toujours les adresses des programmes d'interruptions aux quels le microprocesseur doit se brancher. Le microprocesseur se branche toujours à l'adresse 4 * n et 4 * n +1 pour chercher le contenu sur 16 bits du CS Si on demande l'interruption INT n.
Déroulement d'une interruption externe masquable (exemple dans un PC) :
Reprenons les différents évènements liés à la réception d'une interruption masquable :
1. Un signal INT est émis par un périphérique (ou par l'interface gérant celui- ci).
2. Le contrôleur d'interruptions reçoit ce signal sur une de ses bornes IRQi. Dès que cela est possible (suivant les autres interruptions en attente de traitement), le contrôleur envoie un signal sur sa borne INT.
3. Le microprocesseur prend en compte le signal sur sa borne INTR après avoir achevé l'exécution de l'instruction en cours (ce qui peut prendre quelques cycles d'horloge). Si l'indicateur IF=0, le signal est ignoré, sinon, la demande d'interruption est acceptée.
4. Si la demande est acceptée, le microprocesseur met sa sortie INTA au niveau 0 pendant 2 cycles d'horloge, pour indiquer au contrôleur qu'il prend en compte sa demande.
5. En réponse, le contrôleur d'interruption place le numéro de l'interruption associé à la borne IRQi sur le bus de données.
6. Le processeur lit le numéro de l'interruption sur le bus de données et l'utilise pour trouver le vecteur d'interruption. Ensuite, tout se passe comme pour un appel système c'est à dire que le processeur :
(a) sauvegarde les indicateurs du registre d'état sur la pile ;
(b) met l'indicateur IF à 0 (masque les interruptions suivantes) ;
(c) sauvegarde CS et IP sur la pile ;
(d) cherche dans la table des vecteurs d'interruptions l'adresse du traitant d'interruption, qu'il charge dans CS:IP.
7. La procédure traitant l'interruption se déroule. Pendant ce temps, les interruptions sont masquées (IF=0). Si le traitement est long, on peut dans certains cas ré-autoriser les interruptions avec l'instruction STI.
8. La procédure se termine par l'instruction IRET, qui restaure CS, IP et les indicateurs à partir de la pile, ce qui permet de reprendre le programme qui avait été interrompu.
II-2 ) Interruption logiciel :
Les interruptions logicielles sont semblables aux interruptions matérielles. L'unique différence réside dans le fait que les interruptions logicielles sont émises par des programmes. Les cinq premières interruptions sont définies par Intel. Les autres interruptions sont définies par le DOS et le BIOS. Ces interruptions ont une fonction définie, par exemple la lecture et l'écriture sur le disque, l'écriture des données à l'écran, etc. Contrairement à l'entrée INTR du microprocesseur, l'interruption logicielle ne peut être ni invalidé ni masquée.
Exemple d'interruption software :
Fonctions BIOS :
Int 1Ah, Fct 02h Date et heure : Lecture de l'horloge temps réel BIOS (> AT) : Cette fonction permet de lire l'heure de l'horloge temps réel alimentée par batterie. Comme ce type d'horloge n'existe que sur les AT, seul ce modèle de PC soutient cette fonction.
Entrée :
AH = 02hSortie :
Flag Carry =0 : Tout va bien, dans ce casCH = HeuresCL = MinutesDH = SecondesFlag Carry =1 : La batterie de l'horloge est déchargéeRemarques :
- Toutes les indications sont fournies en format BCD.
- Le contenu des registres BX, SI, DI, BP et des registres de segment n'est pas modifié par cette fonction. Le contenu de tous les autres registres peut avoir été modifié.
Fonction DOS :Int 21h, Fct 06h Entrée/sortie directe de caractère :
Cette fonction permet de sortir des caractères sur le périphérique de sortie standard ou de les lire sur le périphérique d'entrée standard. Le caractère reçu ou écrit chaque fois n'est pas examiné par le système d'exploitation. Rien de particulier ne se produit donc lorsqu'un caractère Ctrl-C apparaît. Comme l'entrée et la sortie standard peuvent être redirigées sur d'autres périphériques ou vers un fichier, les caractères sortis ne doivent pas nécessairement apparaître sur l'écran ni les caractères lus provenir obligatoirement du clavier. Toutefois, lorsque l'accès se fait sur un fichier, il est impossible pour le programme d'appel de détecter si tous les caractères de ce fichier ont déjà été lus ou bien si le support (disquette, disque dur) sur lequel figure ce fichier est déjà plein. Pour l'entrée d'un caractère, la fonction n'attend pas qu'un caractère soit prêt mais revient immédiatement au programme d'appel dans tous les cas.
Entrée :
AH = 06h DL = 0 - 254 : Sortir ce caractère DL = 255 : Lire un caractère Sortie : Pour la sortie de caractères : aucune Pour l'entrée de caractères : Flag Zéro =1 : aucun caractère n'est prêt Flag Zéro =0 : Le caractère entré figure dans le registre ALRemarques :
Lorsque des codes étendus sont lus, le code 0 est tout d'abord renvoyé dans le registre AL. La fonction doit être appelée à nouveau pour lire le code étendu lui-même.
- Le caractère de code ASCII 255 ne peut être sorti à l'aide de cette fonction puisqu'il est interprété comme d'entrée d'un caractère.
- Le contenu des registres AH, BX, CX, DX, SI, DI, BP, CS, DS, SS, ES et du registre de flags n'est pas modifié par cette fonction.
Exemple de programme : lecture et affichage d'un caractère sur
l'écran :
CODE SEGMENT ASSSUME CS :CODE PROG PROC DEBUT : MOV AH,06H ; préparer l'interruption de lecture d'un MOV DL,255 ; caractère INT 21H JZ DEBUT ; si le bit ZF = 0 => aucune touche n'est appuyée MOV DL,AL ; afficher le caractère appuyer . INT 21H MOV AX,4C00H ; retour au DOS INT 21H PROG ENDP CODE ENDS END PROGInt 21h, Fct 09h Sortie d'une chaîne de caractères
Cette fonction permet de sortir une chaîne de caractères sur le périphérique de sortie standard. Comme ce périphérique standard peut être redirigé sur un autre périphérique ou vers un fichier, il n'y a aucune garantie que la chaîne de caractères apparaisse sur l'écran. Si la sortie est redirigée sur un fichier, le programme d'appel n'a aucune possibilité de détecter si le support (disquette, disque dur) sur lequel figure le fichier est déjà plein, autrement dit s'il est encore possible d'écrire la chaîne de caractères dans le fichier.
Entrée :
AH = 09h
DS = Adresse de segment de la chaîne de caractères DX = Adresse d'offset de la chaîne de caractères
Sortie : Aucune
Exemple : affichage d'un message sur l'écran :
DONNEE SEGEMENT MESSAGE DB BONJOUR ISET DE NABEUL $',13,10 DONNEE ENDS CODE SEGMENT ASSUME CS : CODE , DS : DONNEE PROG PROC MOV AX , DONNEE MOV DS , AX LEA DX , MESSAGE ; Pointé le message par DX MOV AH , 09H INT 21H ; afficher le message MOV AX,4C00H ; Retour au DOS INT 21H PROG ENDP CODE ENDS END PROGRemarques :
La chaîne de caractères doit être stockée dans la mémoire sous forme d'une séquence d'octets correspondant aux codes ASCII des caractères composant la chaîne. La fin de la chaîne de caractères doit être signalée au DOS à l'aide d'un caractère "$" (code ASCII 36).
- Si la chaîne de caractères contient des codes de commande comme Backspace, Carriage Return ou Line Feed, ceux-ci seront traités comme tels.
- Seul le contenu du registre AL est modifié par l'appel de cette fonction. Exemple de programme utilisons les interruptions : affichage de l'heure d'un PC :
;******************************************************************************** ;******************************************************************************** ;****************** Programme affichage de l'heur du PC ************************* ;******************************************************************************** ;******************************************************************************** code segment assume cs:code ;*********************** programme principal ************************************ prog proc debut: mov ah,02 int 1aH ; interruption qui permet de lire l'heur du PC mov bl,ch ; ch = heure call affiche ; afficher les heurs mov bl,cl ; cl=minute call affiche ; afficher les minutes mov bl,dh ; dh=seconde call affiche ; afficher les secondes prog endp ; fin de la procédure principale mov dl,13 ; retour chariot mov ah,06 int 21h jmp debut affiche proc ; procédure d'affichage d'un nombre BCD mov dl,bl and dl,0f0h ; masquer pour avoir les dizaines ror dl,1 ; faire une rotation ror dl,1 ror dl,1 ror dl,1 add dl,30h ; ajouter 30H pour avoir le code ASCII correct mov ah,06 ; du chiffre a afficher int 21h mov dl,bl and dl,0fh add dl,30h mov ah,06 int 21h mov dl,':' mov ah,06 int 21h ret affiche endp code ends end progFonctions Gestionnaire de souris
Int 33h, Fct 00h Réinitialisation du driver de souris Initialise le driver de souris et enclenche ainsi le test de la souris. Entrée :
AX = 0000h
Sortie :
AX = FFFFh : dans ce cas, un driver de souris est installé
BX = Nombre de boutons de la Souris (à partir de 1.0)
AX = 0000h : erreur, aucun driver de souris n'est installé
Remarques :
L'appel de cette fonction agit sur toute une série de paramètres de la souris qui peuvent être fixés à l'aide des différentes fonctions de la souris :
- Le curseur de la souris est placé au centre de l'écran puis caché. Il apparaîtra désormais en mode graphique sous forme d'une flèche, alors qu'il sera représenté en mode de texte sous forme d'une case de texte en inversion vidéo. Le curseur de la souris est systématiquement affiché dans la page 0 de l'écran, indépendamment du mode. La zone de déplacement sélectionnée est la totalité de l'écran.
- Les gestionnaires d'événements installés par un programme. Ils sont désactivés.
Int 33h, Fct 01h Afficher le curseur de la souris sur l'écran
Après appel de cette fonction, le curseur de la souris devient visible sur l'écran et suit désormais les déplacements de la souris sur l'écran.
Entrée :
AX = 0001h
Sortie :
Aucune
Remarques :
L'appel de cette fonction entraîne l'incrémentation d'un compteur interne, en fonction duquel le curseur de la souris est ou non affiché sur l'écran. Si ce compteur contient la valeur 0, le curseur de la souris sera affiché sur l'écran, alors que la valeur -1 a pour effet de le faire disparaître de l'écran. Lorsque la fonction 00h (Reset) est appelée, ce compteur est tout d'abord fixé sur -1, pour prendre ensuite la valeur 0 lors du premier appel de cette fonction, ce qui se traduit par la réapparition du curseur sur l'écran.
Int 33h, Fct 03h Lire la position de la souris et l'état des boutons de la souris :
L'appel de cette fonction fournit la position actuelle de la souris et l'état des différents boutons de la souris.
Entrée :
AX = 0003h
Sortie :
BX = Etat des boutons de la Souris (à partir de 1.0) Bit Signification
0 1 = bouton gauche de la souris appuyé
1 1 = bouton droit de la souris appuyé
2 1 = bouton central de la souris appuyé
3-15 Aucune (0)
CX = Position horizontale de la Souris (à partir de 1.0) DX = Position verticale de la souris
Remarques :
Les ordonnées renvoyées dans les registres CX et DX ne se rapportent pas à l'écran physique mais aux positions en points écran dans l'écran virtuel de la souris.
Si la souris ne possède que deux boutons, les informations fournies sur le bouton central sont dépourvues de signification