LA PROGRAMMATION EN MIKROPASCAL
Mon cours a été introduit dans le manuel de cours pour les élèves du BAC technologie pour plus d'informations contactez moi sur le forum. Les schémas et les programmes sont téléchargeables sur le site sous la page téléchargement.
ABIDI Hatem
I- La programmation en langage évolué :
Que ce soit par la méthode graphique ou en langage évolué, l'écriture du programme ainsi que sa mise au point doivent suivre le diagramme suivant :
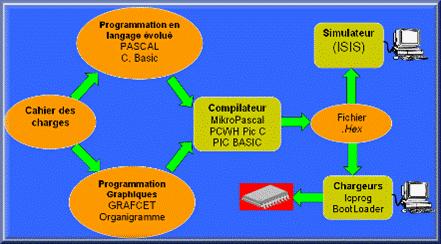
Il faut traduire le cahier des charges en une suite ordonnée d'actions que doit réaliser le processus de commande, cette suite d'opérations sera décomposée en actions élémentaires ou instructions c'est l'Algorithme. Par la suite il suffit de transformer cet algorithme en un langage évolué tel que le langage PASCAL ou le langage C.
Dans la suite du cours on s'intéressera au langage PASCAL. (Compilateur Mikropascal de Mikroelektronika.)
Animation Flash sur Mikropascal
I-1- Structure d'un programme :
Un programme est un texte que le compilateur va traduire en fichier hexadécimal. Alors il doit avoir une structure particulière.
Le texte d'un programme contient au moins trois parties.
- L'entête
Ne contient qu'une ligne; commence par le mot réservé « Program » et donne un nom au programme.
- Les déclarations
Elles permettent de définir les éléments utilisés dans le programme.
En effet on devra déclarer les variables utilisées pour permettre au compilateur d'effectuer les réservations de mémoire ainsi que les sous-programmes (Procédures et fonctions).
- Le corps du programme
Commence par le mot réservé « Begin » et se termine par le mot réservé "End " suivi d'un point final. Ce qui suit ce "End" n'est pas pris en compte par le compilateur.
Entre "Begin" et "End" se trouvent les instructions à effectuer par le programme.
|
Algorithmique |
Langage PASCAL |
|
|
Algorithme NomAlgorithme ; Variables Nomvariable Constantes Nomconstante : Type =valeur ; Début ..... .... Fin. |
Program NomProgramme ; Var Nomvariable : Type ; Const Nomconstante : Type = valeur ; Begin ..... ..... End. |
// entête // déclaration // Programme // principal |
I-2- Les Règles de bases :
· Toutes instructions ou actions se terminent par un point virgule ;
· Une ligne de commentaires doit commencer par "{" et se terminer par "}" ou commence par "//".
· Un bloc d'instructions commence par "Begin" et se termine par "End".
I-3- Les types de variables utilisées en Mikropascal :
|
Type |
Désignation |
Taille |
Rang |
|
octet |
byte |
8....bit |
0 .... 255 |
|
caractère |
char |
8....bit |
0 .... 255 |
|
Mot |
word |
16....bit |
0 .... 65535 |
|
Octet signé |
short |
8....bit |
-128 .... 127 |
|
Entier |
integer |
16....bit |
-32768 .... 32767 |
|
Entier long |
longint |
32....bit |
-2147483648 .... 2147483647 |
|
Réel |
real |
32....bit |
±1.17549435082 * 10-38 .. ±6.80564774407 * 1038 |
|
Tableau |
Array[a..b] of type |
(b-a) éléments |
Rang du type |
|
Chaîne de caractères |
string[n] |
n caractère |
0 .... 255 |
I-4- Les bases du compilateur Mikropascal :
Le décimal : A=10 ; L'hexadécimal A=$0F ; ou A=0x0F ; Le binaire A=%11010100 ;I-5- les opérateurs arithmétiques et logiques :
|
Opérateurs arithmétiques |
Opérateurs de comparaison |
Opérateurs logiques |
|||
|---|---|---|---|---|---|
|
Opérateur |
Opération |
Opérateur |
Opération |
Opérateur |
Opération |
|
+ |
Addition |
= |
Egalité |
AND |
ET |
|
- |
Soustraction |
<> |
Différent |
OR |
OU |
|
* |
Multiplication |
> |
Supérieur |
XOR |
OU exclusif |
|
/ |
Division |
< |
Inférieur |
NOT |
NON |
|
div |
Division entière |
<= |
Inférieur ou égale |
SHL |
Décalage à gauche |
|
mod |
Reste de la division entière |
>= |
Supérieur ou égale |
SHR |
Décalage à droite |
I-5- Les structures usuelles :
a) L'affectation :
C'est l'action d'attribuer une valeur à une variable.
|
Langage algorithmique |
Langage PASCAL |
|---|---|
|
a<== b+c |
a :=b+c |
b) Les structures alternatives :
|
Langage algorithmique |
Langage PASCAL |
|---|---|
SI condition ALORS DEBUT Traitement ; ............; FINSI ; |
IFcondition THEN BEGIN Traitement ; ......... END; |
SI condition ALORS DEBUT Traitement 1; ............; FIN SINON DEBUT Traitement 2; ............; FINSI ; |
IFcondition THEN BEGIN Traitement 1; ........; END ELSE BEGIN Traitement 2; ........; END; |
SELON expression Valeur_1 : action_ 1 ; ............; Valeur_n : action_n ; autrement : action_0 ; FINSELON ; |
CASE expression OF Valeur_1 :action_1; ............; Valeur_n : action _n ; ELSE action_0 ; END; |
c) Les structures itératives ou répétitives :
|
Langage algorithmique |
Langage PASCAL |
|---|---|
I : entier ;
........;
POUR I <Valeur initiale>
JUSQU'A <valeur finale>
FAIRE
DEBUT
Traitement ;
............;
FINFAIRE ; |
I: integer;
..........
FOR I:= <valeur initiale>
TO <Valeur finale>
DO
BEGIN
Traitement ;
........;
END; |
TANQUE condition FAIRE
DEBUT
Traitement ;
............;
FINTANQUE ; |
WHILE condition DO
BEGIN
Traitement ;
........;
END; |
d) Les procédures et les fonctions
Une suite d'instructions peut être rassemblée en un bloc qui peut être appelé depuis plusieurs endroits d'un programme. Ceci donne lieu aux notions de sous programme appelé aussi procédures ou fonctions.
Procédures
Ce sont des groupes d'instructions qui vont former une nouvelle instruction simple utilisable dans un programme. En Pascal il faut les définir avant de les utiliser. Ceci se fait en utilisant une structure similaire à celle d'un programme.
Entête
Procedure Identificateur (Param1:Type1, Param2:Type2,...);Identificateur est le nom de la procédure; Param1, Param2 ... sont des paramètres que le programme fournit à la procédure sous forme de constantes, de variables ou d'expressions; Type1, Type2 ... sont les types de ces paramètres.
Déclarations
Déclarations de constantes, types, variables utilisés à l'intérieur de la procédure
Corps de la procédure
Begin Instruction1; Instruction2;...... End;Il s'agit des instructions exécutées par le programme à l'appel de la procédure. Une procédure peut appeler d'autres procédures définies avant elle. L'appel d'une procédure se fait en écrivant son nom suivi des paramètres nécessaires entre parenthèses.
Fonctions
Une fonction est une procédure qui devra fournir un résultat de type numérique ou chaîne de caractères. La définition se fait en utilisant une structure similaire à celle de la procédure.
Entête
Function Identificateur (Param1:Type1, Param2:Type2,...):Type_R;Identificateur est le nom de la procédure; Param1, Param2 ... sont des paramètres que le programme fournit à la fonction sous forme de constantes, de variables ou d'expressions; Type1, Type2 ... sont les types de ces paramètres; Type_R est le type du résultat fourni par la fonction.
Déclarations
Déclarations de constantes, types, variables utilisés à l'intérieur de la fonction.
Corps de la fonction
Begin Instruction1; Instruction2;...... Identificateur:=résultat; End;Il s'agit des instructions exécutées par le programme à l'appel de la fonction. L'une de ces instructions doit fournir le résultat de la fonction en l'affectant au nom de la fonction. L'appel d'une fonction se fait en écrivant son nom suivi des paramètres nécessaires entre parenthèses. Elle représente une expression du type du résultat fourni.
I-6- Les fonctions adaptées aux microcontrôleurs PIC :
Le compilateur mikropascal apporte une large bibliothèque de procédures et fonctions adaptées aux microcontrôleurs de la famille PIC de MICROCHIP. Ces fonctions sont accessibles dans l'aide du logiciel néanmoins on va citer quelque une.
|
Fonctions / Procédures |
Exemple |
Setbit(port , bit) ; |
Setbit(portB,2) ; mettre la broche RB2 à 1 |
Clearbit(port , bit) ; |
Clearbit(portB,5); mettre la broche RB5 à 0 |
Testbit(port , bit) |
A :=testbit(portB,7);affecter à la variable A l'état de RB7 |
Delay_ms(temps) ; |
Delay_ms(150) ; attente de 150 ms |
Button(port,bit,temps d'appui,état logique actif) |
If Button(portA,2,10,1) then <Action 1> ; On teste l'appui sur un bouton poussoir relié à la broche RA2 pendant 10 ms pour faire l'Action 1 |
II- Les interruptions

II-1- Qu'est-ce qu'une interruption ?
Imaginez une conversation normale. Chaque interlocuteur prend la parole quand vient son tour de parler. Survient alors un évènement extérieur dont le traitement est urgent. Par exemple une voiture s'engage dans votre direction. Vous imaginez bien que votre interlocuteur ne va pas attendre la fin de votre phrase pour vous signaler le danger. Il va donc vous interrompre durant le cours normal de votre conversation; afin de pouvoir traiter immédiatement l'événement extérieur. Les interlocuteurs reprendront leur conversation où elle en était arrivée, sitôt le danger écarté.
II-2- Les interruptions du microcontrôleur PIC16F84:
L'exécution d'une procédure d'interruption répond à un évènement qui peut être interne ou externe au microcontrôleur. L'appel d'une procédure d'interruption ne dépend pas du programme principal, mais elle l'interrompe pendant son exécution.Dans une procédure d'interruption on ne peut pas appeler une autre procédure. Le compilateur Mikropascal utilise une directive spéciale pour le nom de la procédure (Procedure interrupt) pour la différencier avec les autres procédures logicielles.Syntaxe :
Procedure interrupt; Begin Instruction 1; ............ Instruction n; End;On notera que le 16F84 possède 4 sources d'interruptions:
- Un changement d'état sur les broches RB4 à RB7; Une source externe via la broche RB0/INT ;Le débordement du timer 0 ;
- La programmation de l'EEPROM de données.
Le registre INTCON est utilisé pour le contrôle et la gestion des interruptions.
|
INTCON: |
GIE |
EEIE |
T0IE |
INTE |
RBIE |
T0IF |
INTF |
RBIF |
On s'intéressera uniquement à l'interruption externe via la broche RB0/INT, donc on aura à manipuler uniquement les trois bits suivants:
Le bit GIE, "Global lnterrupt Enable", mis à 1 autorise toutes les interruptions non masquées par leur bit individuel.
Le bit INTE, "Interrupt Enable", mis à 1, autorise les interruptions sur RB0/INI.
Le bit INTF, "Interrupt Flag", est un indicateur, il est mis à 1 si une interruption est générée sur RB0/INI. Il doit être remis à 0 par le logiciel dans le programme de traitement de l'interruption.
Pour activer l'interruption externe via la broche RB0/INT on doit affecter la valeur (90)H au registre INTCON :
|
INTCON: |
1 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
= (90)H |
Pour plus d'information sur les autres sources d'interruptions consultez le document constructeur du microcontrôleur 16F84
RÉSUMÉ :
Structure générale d'un programme en Mikropascal pour le microcontrôleur 16F84A
Program nom_programme ; ....>Déclarations de constantes, types, variables utilisés dans le programme. ....>Déclarations des procédures et fonctions utilisées dans le programme. Begin ....>Activation des interruptions utilisées ....>Configuration des entrées/sorties. ....>Initialisation des sorties utilisées. while (1=1) do begin Instruction1; Instruction2; ...... end ; end.Déclaration des variables et des constantes :
Var nomvariable : type ; Const nomconstante : type = valeur ;Déclaration d'une procédure:
Procedure Identificateur (Param1:Type1, Param2:Type2,...); ....>Déclarations de constantes, types, variables utilisés à l'intérieur de la procédure Begin Instruction1; Instruction2; ...... End;Déclaration d'une fonction:
Function Identificateur (Param1:Type1, Param2:Type2,...):Type_R; ....>Déclarations de constantes, types, variables utilisés à l'intérieur de la fonction. Begin Instruction1; Instruction2;...... Identificateur:=résultat; End;Déclaration d'une procédure d'interruption :
Procedure interrupt; Begin Instruction 1; ............; Instruction n; Mise à zéro de l'indicateur correspondant à la source d'interruption utilisée. End;Méthodes usuelles de programmation :
Exercice 1: télécharger les fichiers [programme et simulation sous ISIS]
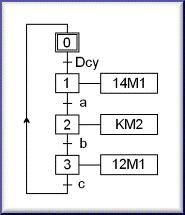
Traduction d'un GRAFCET de point de vue partie commande en un programme en Mikropascal pour le microcontrôleur PIC16F84A.- Soit le GRAFCET suivant :
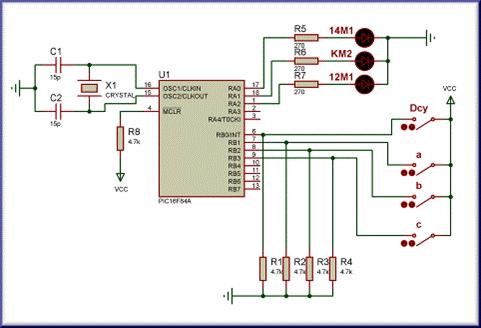
- On vous donne le tableau d'affectation des entrées/sorties pour le microcontrôleur PIC16F84A.

Schéma de simulation :
Travail demandé :
1/ Traduire le GRAFCET précédent en algorithme.
2/ Transformer cet algorithme en programme en Mikropascal.Solution :
1/ L'algorithme :
Algorithme grafcet1 ; Variables X0, X1, X2, X3 : octet ; // Déclaration des étapes du GRAFCET. _DEBUT | TrisA <== $F8 ; // RA0, RA1, RA2 sont des sorties ; | //les autres broches sont des entrées. | TrisB <== $FF ; // Toutes les broches du port B sont des entrées. | PortA <== 0 ; // état initial des sorties. | X0 <==1 ; // Initialement l'étape " X0 " est active. | X1 <== 0 ; // Initialement l'étape " X1 " est non active. | X2 <== 0 ; // Initialement l'étape " X2 " est non active. | X3 <== 0 ; // Initialement l'étape " X3 " est non active. | TANQUE (1=1) FAIRE // Boucle infinie. | _DEBUT | | SI ((X0 =1) ET (Portb.0=1)) ALORS // Condition de franchissement de la | | // première transition qui est : | | // étape " X0 " active et réceptivité " Dcy " vraie. | | _ DEBUT | | | X0<== 0 ; // Désactivation de l'étape " X0 ". | | | X1<== 1 ; // Activation de l'étape " X1 ". | | |_ FINSI ; | | SI ((X1 =1) ET (Portb.1=1)) ALORS // Condition de franchissement de la | | // deuxième transition qui est : | | // étape " X1 " active et réceptivité " a " vraie. | | _ DEBUT | | | X1<== 0 ; // Désactivation de l'étape " X1 ". | | | X2<== 1 ; // Activation de l'étape " X0 ". | | |_ FINSI ; | | SI ((X2 =1) ET (Portb.2=1)) ALORS // Condition de franchissement de la | | // troisième transition qui est : | | // étape " X2 " active et réceptivité " b " vraie. | | _ DEBUT | | | X2<== 0 ; // Désactivation de l'étape " X2 ". | | | X3<== 1 ; // Activation de l'étape " X3 ". | | |_ FINSI ; | | SI ((X3 =1) ET (Portb.3=1)) ALORS // Condition de franchissement de la | | // quatrième transition qui est : | | // étape " X3 " active et réceptivité " c " vraie. | | _DEBUT | | | X3<== 0 ; // Désactivation de l'étape " X3 ". | | | X0<== 1 ; // Activation de l'étape " X0 ". | | |_FINSI ; | | SI (X1=1) ALORS Porta.0 <==1 SINON Porta.0 <==0 ; FINSI; // 14M1 = X1. | | SI (X2=1) ALORS Porta.1 <==1 SINON Porta.1 <==0 ; FINSI; // KM2 = X2. | | SI (X3=1) ALORS Porta.2 <==1 SINON Porta.2 <==0 ; FINSI; // 12M1 = X3. | |_FINFAIRE ; |_ FIN.2/ Le programme :
program GRAFCET1; Var X0,X1,X2,X3:byte ; // Déclaration des étapes du GRAFCET. begin TrisA := $F8 ; // RA0,RA1,RA2 sont des sorties ; // les autres broches sont des entrées. TrisB := $FF ; // Toutes les broches du port B sont des entrées. PortA:= 0 ; // état initial des sorties. X0:=1; // Initialement l'étape " X0 " est active. X1:=0; // Initialement l'étape " X1 " est non active. X2:=0; // Initialement l'étape " X2 " est non active. X3:=0; // Initialement l'étape " X3 " est non active. while (1=1) do // Boucle infinie. begin if ((X0 =1) and (Portb.0=1)) then // Condition de franchissement de la // première transition qui est : // étape " X0 " active et réceptivité " Dcy " vraie. begin X0:=0; // Désactivation de l'étape " X0 ". X1:=1; // Activation de l'étape " X1 ". end ; if ((X1 =1) and (Portb.1=1)) then // Condition de franchissement de la // deuxième transition qui est : // étape " X1 " active et réceptivité " a " vraie. begin X1:=0; // Désactivation de l'étape " X1 ". X2:=1; // Activation de l'étape " X0 ". end ; if ((X2 =1) and (Portb.2=1)) then // Condition de franchissement de la // troisième transition qui est : // étape " X2 " active et réceptivité " b " vraie. begin X2:=0; // Désactivation de l'étape " X2 ". X3:=1; // Activation de l'étape " X3 ". end ; if ((X3 =1) and (Portb.3=1)) then // Condition de franchissement de la // quatrième transition qui est : // étape " X3 " active et réceptivité " c " vraie. begin X3:=0 ; // Désactivation de l'étape " X3 ". X0:=1 ; // Activation de l'étape " X0 ". end ; if (X1=1) then Porta.0:=1 else Porta.0:= 0 ; // 14M1 = X1. if (X2=1) then Porta.1:=1 else Porta.1:= 0 ; // KM2 = X2. if (X3=1) then Porta.2:=1 else Porta.2:= 0 ; // 12M1 = X3. end; end.Cas d'un Grafcet avec une temporisation ici : [programme et simulation sous ISIS]
Exercice 2:
Traduction des équations d'un système combinatoire en un programme en Mikropascal pour le microcontrôleur PIC16F84A.Soit les équations suivantes :

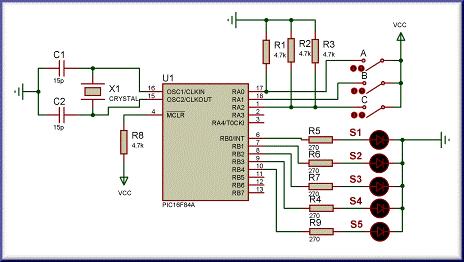
Schéma de simulation :
Travail demandé :
1/ Traduire les équations précédentes en algorithme.
2/ Transformer cet algorithme en programme en Mikropascal.
Solution : Première méthode :
1/ Algorithme :
Algorithme EQUATIONS1; _DEBUT | trisA <== $FF; // Tout le port A est configuré en entrée . | trisB <== $E0; // de RB0 à RB4 sorties les autres broches : entrées . | portb <== 0; // initialisation des sorties | TANQUE (1=1) FAIRE // boucle infinie | _DEBUT | |// équation de S0 : | | SI ((portA.0=1) ET (portA.1=1) ET ( portA.2=0)) ALORS | | portb.0<==1 SINON portb.0 <== 0; FINSI ; | |//équation de S1 : | | SI ((portA.1=1) XOR (portA.2=1)) ALORS | | portb.1<==1 SINON portb.1 <== 0; FINSI ; | |//équation de S2 : | | SI ((portA.0=1) OU ((portA.1=1) ET (portA.2=0))) ALORS | | portb.2<==1 SINON portb.2 <== 0; FINSI ; | |// équation de S3 | | SI ((portA.1=0) ET (portA.2=0)) ALORS | | portb.3<==1 SINON portb.3<==0; FINSI ; | |// équation de S4 | | SI ((portA.1=0) OU (portA.2=0)) ALORS | | portb.4<==1 SINON portb.4<==0; FINSI ; | | _FINFAIRE; |_FIN.2/ Programme :
program EQUATIONS1; _begin |trisA:=$FF; // Tout le port A est configuré en entrée . |trisB:=$E0; // de RB0 à RB4 sorties les autres broches : entrées . |portb:=0; // initialisation des sorties |while (1=1) do // boucle infinie | _begin // équation de S0 : ||if((portA.0=1) and (portA.1=1) and ( portA.2=0)) then || portb.0:=1 else portb.0:=0; //équation de S1 : ||if((portA.1=1) xor (portA.2=1))then || portb.1:=1 else portb.1:=0; //équation de S2 : ||if ((portA.0=1) or ((portA.1=1) and (portA.2=0))) then || portb.2:=1 else portb.2:=0; // équation de S3 ||if ((portA.1=0) and (portA.2=0)) then || portb.3:=1 else portb.3:=0; // équation de S4 ||if((portA.1=0) or (portA.2=0))then || portb.4:=1 else portb.4:=0; ||_end; |_end.Deuxième méthode
1/ Algorithme :
Algorithme EQUATIONS; Variables S1, S2, S3, S4, S5 : octet; // déclaration des variables de sortie. _ DEBUT| TrisA <== $FF; // port A : entrée | TrisB <== $E0; //RB0, RB1, RB2, RB3, RB4 : sorties ; RB5 ....RB7 : entrées | Portb <== 0; // initialisation des sortie | TANQUE (1=1) FAIRE // boucle infinie | _ DEBUT | | S1<==((portA.0) ET (portA.1) ET ((not portA.2))); // équation de S1 | | S2<==((portA.1) OU exclusif (portA.2)); // équation de S2 | | S3<==((portA.0) OU ((portA.1) ET ((not portA.2)))); // équation de S3 | | S4<== non ((portA.1) OU (portA.2)); // équation de S4 | | S5<== non ((portA.1) ET (portA.2)); // équation de S5 | | | | S1<==S1 ET $01; // S1, S2, S3, S4, S5 sont de type octet (8 bits) | | S2<==S2 ET $01; // or on veut travailler avec un seul bit | | S3<==S3 ET $01; // qui est le poids le plus faible (20) | | S4<==S4 ET $01; // alors il faut masquer les autres bits. | | S5<==S5 ET $01; // exp a (ocet) ; si a=0 alors non a=(11111111)2 | | | | SI (S1=1) ALORS portb.0<==1 SINON portb.0<==0; FINSI; // RB0 = S1. | | SI (S2=1) ALORS portb.1<==1 SINON portb.1<==0; FINSI; // RB0 = S1. | | SI (S3=1) ALORS portb.2<==1 SINON portb.2<==0; FINSI; // RB0 = S1. | | SI (S4=1) ALORS portb.3<==1 SINON portb.3<==0; FINSI; // RB0 = S1. | | SI (S5=1) ALORS portb.4<==1 SINON portb.4<==0; FINSI; // RB0 = S1. | |_FINFAIRE; |_FIN.2/ Programme :
program EQUATIONS; Var S1,S2,S3,S4,S5 : byte; // déclaration des variables de sortie. begin trisA:=$FF; // port A : entrée. trisB:=$E0; //RB0, RB1, RB2, RB3, RB4 : sorties ; RB5 ....RB7 : entrées portb:=0; // initialisation des sortie while (1=1) do // boucle infinie begin S1:=((portA.0) and (portA.1) and ((not portA.2))); // équation de S1 S2:=((portA.1) xor (portA.2)); // équation de S2 S3:=((portA.0) or ((portA.1) and ((not portA.2)))); // équation de S3 S4:= not((portA.1) or (portA.2)); // équation de S4 S5:= not((portA.1) and (portA.2)); // équation de S5 S1:=S1 and $01; // S1, S2, S3, S4, S5 sont de type octet (8 bits) S2:=S2 and $01; // or on veut travailler avec un seul bit S3:=S3 and $01; // qui est le poids le plus faible (20) S4:=S4 and $01; // alors il faut masquer les autres bits. S5:=S5 and $01; // exp a (ocet) ; si a=0 alors non a=(11111111)2 if (S1=1) then portb.0:=1 else portb.0:=0; // RB0 = S1. if (S2=1) then portb.1:=1 else portb.1:=0; // RB1 = S2. if (S3=1) then portb.2:=1 else portb.2:=0; // RB2 = S3. if (S4=1) then portb.3:=1 else portb.3:=0; // RB3 = S4. if (S5=1) then portb.4:=1 else portb.4:=0; // RB4 = S5. end; end.Exercice 3:
Utilisation de l'interruption externe pour le comptage de pièces sur un tapis roulant dans un processus industriel.Principe de fonctionnement :
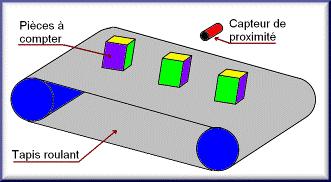
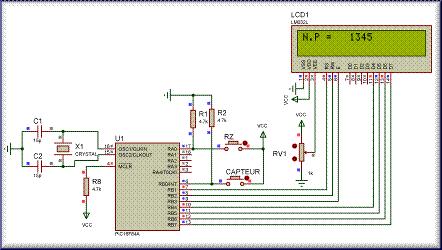
- Ce tapis roulant se trouve à la fin d'une chaine de fabrication de pièces mécaniques.- Un capteur de proximité permet de compter le nombre de pièces fabriquées.- Un bouton poussoir RZ permet de mettre le compteur à zéro.- Le nombre de pièce comptées est affiché par un afficher LCD.Schéma de la carte de commande :
Travail demandé :
1/ Traduire le fonctionnement de ce système par algorithme.2/ Transformer cet algorithme en programme en Mikropascal.
Solution :
1/ L'algorithme :
Algorithme COMPTEUR; Variables compteur : entier; // déclaration de la variable de comptage : entier. nombre : chaine de caractère [12]; // déclaration d'une chaine de 12 caractères // pour l'affichage. procédure interruption; // sous programme d'interruption. _DEBUT | intcon<==$90; // validation de l'interruption RB0 | //et mise à zéro de son drapeau le bit INTF | compteur<==compteur+1; // incrémentation du compteur. |_FIN; _DEBUT | lcd_config(portb,1,3,2,7,6,5,4); | //configuration de l'LCD doit toujours être avant la | //configuration des registres TRISx | // lcd_config(le port, RS, E, RW, D7, D6, D5, D4) | lcd_cmd(lcd_cursor_off); // éteindre le curseur de l'afficheur LCD | TrisA<==$FF; //portA entrée | TrisB<==$01; // RB0 : entrée ; les autres broches : sorties pour l'LCD | intcon<==$90; // activation de l'interruption externe RB0/INT | compteur<==0; // initialisation du compteur. | lcd_out(1,1,'N.P ='); | //afficher sur la 1ere ligne et la 1ere colonne de l'LCD " N.P= ". | TANQUE (1=1) FAIRE // boucle infinie. | _DEBUT | | inttostr (compteur,nombre); | | // changement de la variable " compteur " | | //en une chaine de caractère qui est " nombre ". | | lcd_out(1,6,nombre); //afficher sur la 1ere ligne | | //et la 6emme colonne de l'LCD :" nombre ". | | SI (porta.0=1) ALORS | | compteur<==0;FINSI; // l'appui sur le bouton RZ | | // initialise le compteur. | |_FINFAIRE; |_FIN.2/ Le programme :
program COMPTEUR; Var compteur : integer; // déclaration de la variable de comptage : entier. nombre : string[12]; // déclaration d'une chaine de caractère pour l'affichage. procedure interrupt; // sous programme d'interruption. begin intcon:=$90; // validation de l'interruption RB0 //et mise à zéro de son drapeau le bit INTF compteur:=compteur+1; // incrémentation du compteur. end; begin lcd_config(portb,1,3,2,7,6,5,4); //configuration de l'LCD doit toujours être avant la //configuration des registres TRISx // lcd_config(le port, RS, E, RW, D7, D6, D5, D4) lcd_cmd(lcd_cursor_off); // éteindre le curseur TrisA:=$FF; //portA entrée TrisB:=$01; // RB0 : entrée ; les autres broches : sorties pour l'LCD intcon:=$90; // activation de l'interruption externe RB0/INT compteur:=0; // initialisation du compteur. lcd_out(1,1,'N.P ='); //afficher sur la 1ere ligne //et la 1ere colonne de l'LCD " N.P= ". while (1=1) do // boucle infinie. begin inttostr(compteur,nombre); // changement de la variable " compteur " //en une chaine de caractère qui est " nombre ". lcd_out(1,6,nombre); //afficher sur la 1ere ligne //et la 6emme colonne de l'LCD :" nombre ". if (porta.0=1) then compteur:=0; // l'appui sur le bouton RZ initialise le compteur. end; end.Exercice 4: Extension d'un port pour le microcontrôleur PIC16F84A.
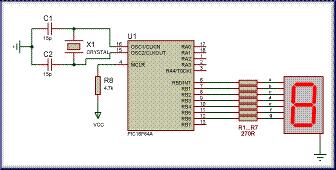
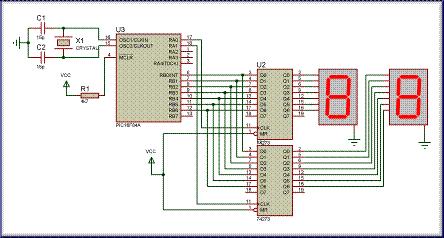
On désire réaliser un compteur modulo 100 en utilisant le microcontrôleur 16F84A et deux afficheurs sept segments.
A / Etude préliminaire :
On vous donne le schéma suivant :
1/ Ecrire le programme correspondant afin de réaliser un compteur modulo 10.
2/ Peut-on ajouter un deuxième afficheur sur les ports du microcontrôleur.
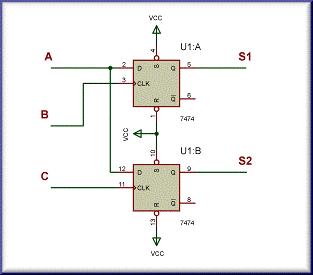
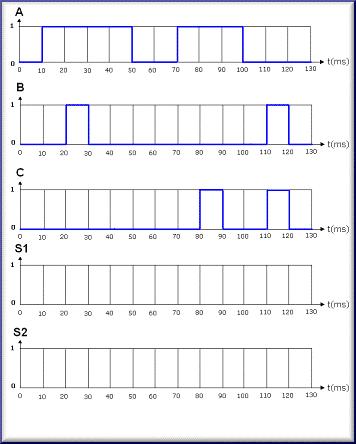
3/ Soit le schéma suivant :
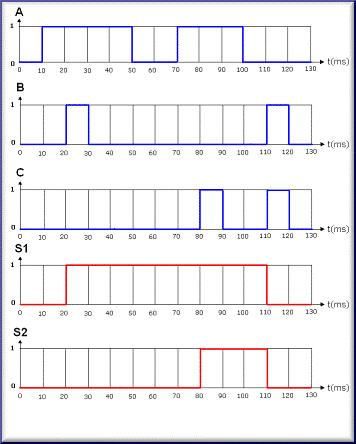
4/ Compléter les chronogrammes suivant :
B/ Extension du port B du microcontrôleur :
1/ On vous donne le circuit 74273, qui contient 8 bascules D avec horloge et remise à zéro communes, proposer une solution pour réaliser un compteur modulo 100 avec le PIC16F84A.

2/ Ecrire le programme correspondant.
Solution :
A/
1/Première méthode :
 program COMPTEURMOD10a; beginTrisb:=0; portb:=0; while (1=1) do begin //segments [ g f e d c b a] portb:=%00111111 ; // chiffre 0 delay_ms(1000); // attente d'une seconde portb:=%00000110; // chiffre 1 delay_ms(1000); portb:=%01011011; // chiffre 2 delay_ms(1000); portb:=%01001111; // chiffre 3 delay_ms(1000); portb:=%01100110; // chiffre 4 delay_ms(1000); portb:=%01101101; // chiffre 5 delay_ms(1000); portb:=%01111101; // chiffre 6 delay_ms(1000); portb:=%00000111; // chiffre 7 delay_ms(1000); portb:=%01111111; // chiffre 8 delay_ms(1000); portb:=%01101111; // chiffre 9 delay_ms(1000); end; end.
program COMPTEURMOD10a; beginTrisb:=0; portb:=0; while (1=1) do begin //segments [ g f e d c b a] portb:=%00111111 ; // chiffre 0 delay_ms(1000); // attente d'une seconde portb:=%00000110; // chiffre 1 delay_ms(1000); portb:=%01011011; // chiffre 2 delay_ms(1000); portb:=%01001111; // chiffre 3 delay_ms(1000); portb:=%01100110; // chiffre 4 delay_ms(1000); portb:=%01101101; // chiffre 5 delay_ms(1000); portb:=%01111101; // chiffre 6 delay_ms(1000); portb:=%00000111; // chiffre 7 delay_ms(1000); portb:=%01111111; // chiffre 8 delay_ms(1000); portb:=%01101111; // chiffre 9 delay_ms(1000); end; end.Deuxième méthode :
program COMPTEURMOD10b; var i : integer; const chiffre : array[10] of byte =(%00111111, %00000110, %01011011,%01001111, %01100110, %01101101, %01111101, %00000111, %01111111,%01101111); begin Trisb:=0; portb:=0; while (1=1) do begin for i := 0 to 9 do // compteur begin portb:=chiffre[i]; // affichage du chiffre delay_ms(1000); // attente d'une seconde end; end; end.2/Pour pouvoir contrôler deux afficheurs sept segments avec un microcontrôleur il faut avoir au minimum 14 sorties sur ce dernier or le PIC16F84A ne possède que 13 entrée/sortie (8 sur le port B et 5 sur le port A) alors que faire ?
3/
B/1/
2/
program COMPTEURMOD100; var i,j : integer; const chiffre : array[10] of byte =(%00111111, %00000110, %01011011,%01001111, %01100110, %01101101, %01111101, %00000111, %01111111,%01101111); begin Trisa:=$FC; porta:=0; Trisb:=0; portb:=0; while (1=1) do begin for j := 0 to 9 do // compteur des dizaines begin portb:=chiffre[j]; // affichage du chiffre des dizaines porta.0:=1; // delay_ms(1); // Génération d'un front d'horloge sur RB0 porta.0:=0; for i := 0 to 9 do // compteur des unités begin portb:=chiffre[i]; // affichge du chiffre des unités porta.1:=1; delay_ms(1); // Génération d'un front d'horloge sur RB1 porta.1:=0; delay_ms(1000); // attente d'une seconde end; end; end; end.
Exercice 4:
Gestion d'un clavier matriciel par le microcontrôleur PIC16F84A.Soit le schéma suivant :
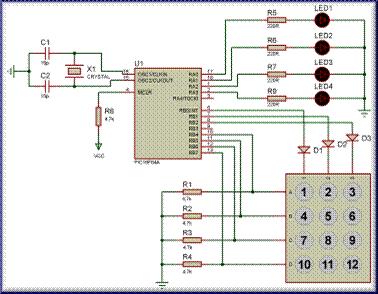
Dans un premier lieu on s'intéressera au clavier.Schéma structurel d'un clavier 12 touches
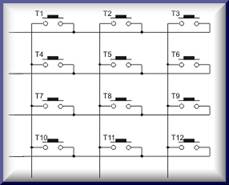
Le principe de ce type de clavier est simple en effet l'appui sur une touche réalise un contact direct entre la ligne et la colonne de cette touche. Pour pouvoir lire une touche appuyée par le microcontrôleur on procède comme suit:
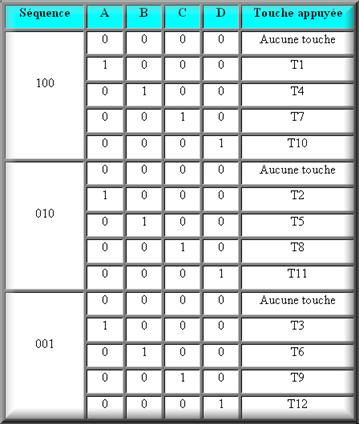
On fait un balayage sur les colonnes c'est-à-dire on envoie les séquences suivantes (100, 010, 001).On lit l'état des lignes sur 4 bits (A, B, C, D)On aura le tableau de correspondance suivant :
On désire afficher le code binaire correspondant à la touche appuyée sur les diodes led.
Travail demandé :
1/ Traduire le fonctionnement de ce système par algorithme.
2/ Transformer cet algorithme en programme en Mikropascal.
Solution :
1/ Algorithme :
Algorithme clavier ; Variables T : octet ; _ Début | T<== 0 ; {Initialisation de la variable T } | TRISA <== $F0 ; { RA0, RA1, RA2, RA3 : sorties ; } | PortA <== 0 ; {Initialisation du portA } | TRISB <== $F8 ; {RB0, RB1, RB2 : sorties ; RB3, RB4, RB5, RB6, RB7 : entrées} | TANQUE (1=1) FAIRE {Boucle infinie} | _ Début | | PortB <== (00000001)2 ; {Première séquence} | | Attente (10ms) ; | | T<== PortB ; | | T<== T décalé à droite de 4 positions ;{Lecture de RB4, RB5, RB6 et RB7 } | | SI T=8 ALORS T<== 10; FINSI; {codage des touches } | | SI T=4 ALORS T<== 7; FINSI; | | SI T=2 ALORS T<== 4; FINSI; | | SI T<> 0 ALORS PortA<==T ;{Afficher le numéro de la touche appuyée} | | FINSI; { sur le portA } | | PortB <== (00000010)2 ; {Deuxième séquence} | | Attente (10ms) ; | | T <== PortB ; | | T <== T décalé à droite de 4 positions ;{Lecture de RB4, RB5, RB6 et RB7} | | SI T=8 ALORS T <== 11 ; FINSI; {codage des touches } | | SI T=4 ALORS T <== 8 ; FINSI; | | SI T=2 ALORS T <== 5 ; FINSI; | | SI T=1 ALORS T<== 2 ; FINSI; | | SI T<> 0 ALORS PortA<==T ; {Afficher le numéro de la touche appuyée} | | FINSI; { sur le portA } | | PortB <== (00000100)2 ; {Troisième séquence} | | Attente (10ms) ; | | T <== PortB ; | | T<==T décalé à droite de 4 positions ; {Lecture de RB4, RB5, RB6 et RB7} | | SI T=8 ALORS T <== 12 ; FINSI; | | SI T=4 ALORS T <== 9 ; FINSI; | | SI T=2 ALORS T <== 6 ; FINSI; | | SI T=1 ALORS T <== 3 ; FINSI; {codage des touches } | | SI T<> 0 ALORS PortA<==T ; FINSI;{Afficher le numéro de la touche appuyée} | | { sur le portA } | |_FinFaire ; |_Fin.
2/ Programme
program clavier; Var T : byte ; begin T:= 0 ; {Initialisation de la variable T } TRISA := $F0 ; { RA0, RA1, RA2, RA3 : sorties ; } portA:=0; {Initialisation du portA } TRISB :=$F8 ;{RB0, RB1, RB2 : sorties ; RB3, RB4, RB5, RB6, RB7 : entrées } while (1=1) do {Boucle infinie} begin PortB := %00000001 ; {Première séquence} delay_ms(10) ; T:= PortB ; T:= T shr 4 ; {Lecture de RB4, RB5, RB6 et RB7} if T=8 then T:= 10; {codage des touches } if T=4 then T:= 7; if T=2 then T:= 4; if T<> 0 then PortA:=T ;{Afficher le numéro de la touche appuyée sur le portA } PortB :=%00000010 ; {Deuxième séquence} delay_ms(10) ; T := PortB ; T := T shr 4 ; {Lecture de RB4, RB5, RB6 et RB7} if T=8 then T := 11 ; {codage des touches } if T=4 then T := 8 ; if T=2 then T := 5 ; if T=1 then T := 2 ; if T<> 0 then PortA := T ;{Afficher le numéro de la touche appuyée sur le portA } PortB := %00000100 ; {Troisième séquence} delay_ms(10) ; T := PortB ; T := T shr 4 ; {Lecture de RB4, RB5, RB6 et RB7} if T=8 then T := 12 ; if T=4 then T := 9 ; if T=2 then T := 6 ; if T=1 then T := 3 ; {codage des touches } if T<> 0 then PortA := T ;{Afficher le numéro de la touche appuyée sur le portA } end ; end.Les librairies les plus utilisées en Mikropascal sont :
- LCD Library
- Keypad Library
- Delays Library
- Util Library
1/ LCD library :
Le compilateur MikroPascal fournit une bibliothèque pour communiquer avec l'afficheur LCD utilisé généralement en mode 4-bit
a) Lcd_Config :
Syntaxe
Lcd_Config (var port : byte; const. RS, EN, WR, D7, D6, D5, D4 : byte);
Description
Initialiser l'afficheur LCD et définir les broches du microcontrôleur à relier à l'LCD.
Exemple
Lcd_Config (PORTD,1,2,0,3,5,4,6);b)
b) Lcd_Init :
Syntaxe
Lcd_Init (var port : byte);
Description
Initialiser l'afficheur LCD avec le PIC en spécifiant le port uniquement, le branchement de l'LCD avec le microcontrôleur est imposé par Mikropascal (consulter l'aide du logiciel)
Exemple
Lcd_Init (PORTB);
c) Lcd_Out :
Syntaxe
Lcd_Out (row, col : byte; var text : array[255] of char);
Description
Ecrire un Texte sur l'afficheur LCD en indiquant sa position (ligne et colonne).
Exemple
Ecrire "Hello!" sur LCD sur la ligne 1, colonne 3:Lcd_Out(1, 3, 'Hello!');
d) Lcd_Out_Cp :
Syntaxe
Lcd_Out_Cp(var text : array[255] of char);
Description
Ecrire le texte sur l'afficheur LCD à la position actuelle de curseur.
Exemple
Afficher " salut " à la position actuelle de curseur :Lcd_Out_Cp('salut');
e) Lcd_Chr :
Syntaxe
Lcd_Chr(row, col, character : byte);
Description
Ecrire un Caractère sur l'LCD en indiquant sa position (ligne et colonne).
Exemple
Ecrire "i" sur LCD sur la ligne 2, colonne 3:Lcd_Chr(2, 3, 'i');
f) Lcd_Chr_Cp :
Syntaxe
Lcd_Chr_Cp(character : byte);
Description
Ecrire un caractère sur l'afficheur LCD à la position actuelle de curseur.
Exemple
Ecrire "e" à la position actuelle du curseur.Lcd_Chr_Cp('e');
g) Lcd_Cmd :
Syntaxe
Lcd_Cmd (command : byte);
Description
Envoie une commande à l'afficheur LCD. La liste complète des commandes est la suivante :
LCD_FIRST_ROW Déplacer le curseur à la 1ère ligne LCD_SECOND_ROW Déplacer le curseur à la 2 ème ligne LCD_THIRD_ROW Déplacer le curseur à la 3 ème ligne LCD_FOURTH_ROW Déplacer le curseur à la 4 ème ligne LCD_CLEAR Effacer le contenu de l'afficheur LCD LCD_RETURN_HOME Retour du Curseur à la position initiale LCD_CURSOR_OFF Arrêter le curseur LCD_MOVE_CURSOR_LEFT Déplacer le curseur à gauche LCD_MOVE_CURSOR_RIGHT Déplacer le curseur à droite LCD_TURN_ON Activer l'affichage sur l'afficheur LCDLCD_TURN_OFF Arrêter l'affichage sur l'afficheur LCDLCD_SHIFT_LEFT Décalage de l'affichage à gauche LCD_SHIFT_RIGHT Décalage de l'affichage à droite2/ Keypad Library :
Le MikroPascal fournit une bibliothèque pour travailler avec les claviers matriciels.
a) Keypad_Init :
Syntaxe
Keypad_Init(var port : word);
Description
Initialiser et préciser le port sur le quel est branché le clavier.
Exemple
Keypad_Init(PORTB);
b) Keypad_Read :
Syntaxe
Keypad_Read : byte;
Description
Vérifier si une touche est appuyée. La fonction renvoie 1 à 15, selon la touche appuyée, ou 0 si aucune touche n'est actionnée.
Exemple
kp := Keypad_Read;
c) Keypad_Released :
Syntaxe
Keypad_Released :byte;
Description
L'appel de Keypad_Released génère une attente jusqu'à ce qu'une touche soit appuyée et libérée. Une fois libérée, la fonction renvoie 1 à 15, selon la touche.
Exemples
kp := Keypad_Released;
3/ Delays Library :
MikroPascal fournit une procédure pour créer des temporisations.
a) Delay_us :
Syntaxe
Delay_us(const time_in_us : word);
Description
Crée un retard dont la durée en microsecondes est time_in_us (une constante). La gamme des constantes applicables dépend de la fréquence de l'oscillateur
Exemple
Delay_us(10); // Dix microsecondes
b) Delay_ms :
Syntaxe
Delay_ms(const time_in_ms : word);
Description
Crée un retard dont la durée en millisecondes est time_in_ms (une constante). La gamme des constantes applicables dépend de la fréquence de l'oscillateur.
Exemple
Delay_ms(1000); // une seconde.
c) Vdelay_ms :
Syntaxe
Vdelay_ms(time_in_ms : word);
Description
Crée un retard dont la durée en millisecondes est time_in_ms (une variable).
Exemple
Var Pause : integer ;
//....
Pause := 1000;
// ...
Vdelay_ms(pause); // pause d'une seconde
d) Delay_Cyc :
Syntaxe
Delay_Cyc(cycles_div_by_10 : byte);
Description
Crée un retard dont la durée est fonction de l'horloge du microcontrôleur.
Exemple
Delay_Cyc(10);
4/ Util Library
La bibliothèque 'util library' contient des diverses routines utiles pour le développement de programmes.
Button
Syntaxe
Button (var port : byte; pin, time, active_state : byte) : byte;
Description
Les Paramètres (port) et (pin) indiquent l'endroit du bouton ; le paramètre temps d'appui nécessaire pour rendre le bouton actif ; le paramètre active_state, peut être 0 ou 1, il détermine si le bouton est ouvert au repos ou fermé au repos.
Exemple
while true do begin if Button(PORTB, 0, 1, 1) then oldstate := 255; if oldstate and Button(PORTB, 0, 1, 0) then begin PORTD := not(PORTD); oldstate := 0; end; end;5/ Autres fonctions intégrés:
Le compilateur mikroPascal fournit un ensemble de fonctions de service intégrées utiles. Les fonctions intégrées n'ont aucune condition spéciale ; vous pouvez les employer dans n'importe quelle partie de votre programme.
a)SetBit :
Syntaxe
SetBit(var register : byte; bit : byte);
Description
Le Paramètre bit doit être une variable
Exemple
SetBit(PORTB, 2); // RB2 =1 ;
b) ClearBit :
Syntaxe
ClearBit(var register : byte; bit : byte);
Description
Le Paramètre bit doit être variable.
Exemple
ClearBit(PORTC, 7); // RC7 =0 ;c)
c) TestBit :
Syntaxe
TestBit(var register : byte; bit : byte) : byte;
Description
Cette Fonction teste si le paramètre bit est égal à 1. Si oui, la fonction renvoie 1, si non elle renvoie 0. Le Paramètre bit doit être variable.
Exemple
flag := TestBit(PORTB, 2); // flag =1 si RB2 =1