Introduction sur les systemes a base de microprocesseur
I ) Architecture d'un système à base de microprocesseur :
Un système à base de microprocesseur est formé des trois éléments :
- Une unité CPU (central processing unit )
- Une mémoire (ROM et RAM)
- Des ports d'entrées/sorties.
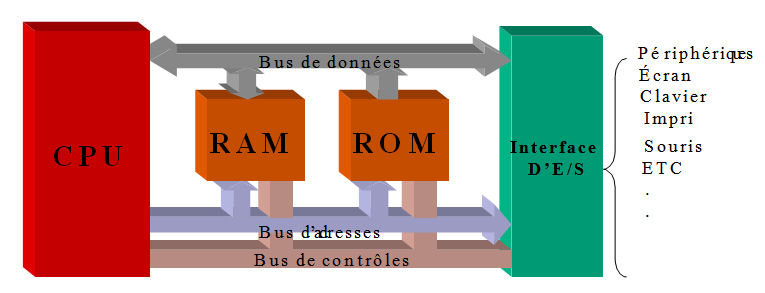
Les trois modules sont interconnectés comme le montre la figure suivante autour de trois bus : bus de données, bus d'adresses et bus de contrôles et commandes
Bus : Il s'agit de plusieurs pistes électroniques qui sont reliées au microprocesseur. Ces bus assurent la communication interne et externe du microprocesseur.
- Le bus de données : c'est un ensemble de fils bidirectionnels qui va permettre le transfert de données entre les différents éléments du système. C'est par ce bus que sont transmises les données qui doivent être traitées par le microprocesseur. A l'inverse, c'est également par ce bus que transitent les résultats en sortie du microprocesseur. Autrement dit, toutes les données entrantes et sortantes du microprocesseur sont véhiculées par le bus de données qui fixe la longueur du mot échangé avec la mémoire.
- Le bus d'adresses : il permet d'adresser un élément par le microprocesseur .il est unidirectionnel .il détermine la capacité maximale d'adressage du système, c'est à dire le nombre maximum de mots de la mémoire associée (ex : 16 bits "adressent" 64 Kmots).
- Le bus de commandes et de contrôle : c'est un bus qui permet de véhiculer les signaux de contrôles et de commandes tels que l'horloge les signaux Rd/Wr etc ... Ce bus sert à coordonner tous les échanges d'informations décrits précédemment. Il véhicule des données qui valident la mémoire et les ports d'entrées ) sorties. Il introduit des délais d'attente lorsque des informations sont envoyées à un périphérique qui présente une vitesse de traitement réduite. Le bus de commandes évite les conflits de bus lorsque deux éléments cherchent à communiquer en même temps.
Remarque :
Dans certains cas, le bus de données et le bus d'adresses sont multiplexés sur un seul bus. Une logique externe doit alors effectuer le démultiplexage.
-La mémoire sert au rangement de deux types d'informations :
-Des données : les informations traitée par le microprocesseur.
-Des instructions : ensemble d'informations codées qui gère l'activité du microprocesseur.
Remarque :
La mémoire morte (ROM : Read Only Memory) range en général le programme d'initialisation du système (exemple dans le PC elle range le BIOS : Basic Input Ouput systeme ) .
La mémoire vive (RAM : Random Axes Memory) sert au rangement des programmes utilisateurs c'est une mémoire volatile.
- Les interfaces d'entrées sorties vont permettre au microprocesseur de communiquer avec le monde extérieur, Nous trouvons des ports utilisés exclusivement pour l'entrée, et d'autres ports exclusivement pour la sortie. Il existe aussi des ports bidirectionnels. Donc le microprocesseur peut lire des données à partir d'une interface d'entrée (exemple souris, clavier disque dur, Etc. ...) de même il peut restituer le résultat de son traitement au monde extérieur en adressent des interfaces de sortie (tel que les imprimantes le clavier etc. ...) donc les interfaces d'entrées / sorties vont soulager le microprocesseur pour la communication avec le monde extérieur .
Le microprocesseur doit Donc contrôler les fonctions effectuées par les autres modules, il doit chercher ainsi que décoder des instructions ranger en mémoire, et il doit adresser des interfaces d'entrées/sorties pour lire des données du monde extérieur, et restituer le résultat de son traitement.
II ) Architecture d'un CPU :
Une CPU est formée par les trois éléments fonctionnels interconnectés suivants :
► Registres.
► UAL : Unité arithmétique et logique.
► Circuit de contrôle.
II-1 ) Les registres :
II-1-1 ) L'accumulateur :
Il s'agit d'un registre d'usage général recevant des opérandes, des résultats intermédiaires ou des résultats provenant de l'unité arithmétique et logique. Ils évitent des appels fréquents à la mémoire, réduisant ainsi les temps de calcul. Donc la plupart des opérations arithmétiques et logiques se font dans l'accumulateur.
II-1-2 ) Le compteur de programme :
Le compteur de programme contient l'adresse (décalage ou offset) de l'instruction suivante en mémoire qui doit être exécutée. Autrement dit, il doit indiquer au processeur la prochaine instruction à exécuter. Le registre compteur de programme est constamment modifié après l'exécution de chaque instruction afin qu'il pointe sur l'instruction suivante. Les microprocesseurs de la famille x86 dépendent entièrement du registre compteur de programme pour connaître l'instruction suivante.
II-1-3 ) Registre d'instruction et décodeur d'instruction :
II-1-3-1 ) Le registre d'instruction :
Chaque opération que le microprocesseur va effectuer est codée (c'est-à-dire pour chaque instruction on assigne un code qui ne peut pas être modifié ni changé par un autre code) appelé « instruction code» ou « opération code » , pour exécuter une instruction le microprocesseur transmet l'adresse se trouvant dans le registre compteur de programme à la mémoire , la mémoire retourne au microprocesseur l'octet adresse par ce dernier ( le code de l'instruction) celui-ci sera stocker dans un registre appelé registre d'instructions (RI) , donc Le registre d'instructions contient la prochaine instruction à être exécutée par le processeur. Cette instruction sera acheminée (par un bus de données) au décodeur d'instructions qui sera chargé de l'interpréter.
II-1-3-2 ) Le décodeur d'instruction :
C'est lui qui va interpréter l'instruction contenue dans le registre d'instruction (RI). C'est-à-dire qu'elle est l'opération à effectuer (Addition, branchement etc...) Et comment aller chercher les opérandes requises pour cette opération (par exemple, les nombres à additionner). Le décodeur d'instructions communique alors avec l'unité de commandes et de contrôles qui pourra déclencher les événements en conséquence. Par exemple, si le décodeur d'un 8086 reçoit l'octet 10000001 (le "Add mem/reg data"), il sait que le processeur doit aller chercher 3 autres octets en mémoire vive pour compléter l'instruction.
II-1-4/ Registres d'adresses :
Ces registres servent à gérer l'adressage de la mémoire. En effet le processeur peut utiliser un registre ou une paire de registres pour accéder à un emplacement mémoire, et puisque les registres peuvent être incrémenter ou décrémenter donc on peut accéder facilement à des données qui se trouvent en mémoire d'une manière adjacente (tel que les tableaux)
II-1-5 Registre d'état (FLAGS) :
Le registre d'état FLAG sert à contenir l'état de certaines opérations effectuées par le processeur. Par exemple, quand le résultat d'une opération est trop grand pour être contenu dans le registre cible (celui qui doit contenir le résultat de l'opération), un bit spécifique du registre d'état (le bit OF) est mis à 1 pour indiquer le débordement
II-2 ) L'unité arithmétique et logique (UAL):
Comme son nom l'indique, cette unité peut exécuter deux types d'opérations.
- Opérations arithmétiques
Elles incluent l'addition et la soustraction qui sont des opérations de base (une soustraction est une addition avec le complément à deux), la multiplication et la division. Les données traitées sont considérées dans des représentations entières.
- Opérations logiques
Ces opérations sont effectuées bit à bit sur les bits de même poids de deux mots, tel que ET, OU, NOT OU EXCLUSIF, de même les opérations de rotation et de décalage (arithmétique et logique)
Elle reçoit ses opérandes (les octets qu'elle manipule) du bus de données. Celles-ci peuvent provenir de registres ou de la mémoire. A la fin d'une opération, l'UAL peut aller modifier certains bits du registre d'état
(FLAG). Par exemple, dans le cas du débordement d'une addition (que le résultat de l'addition est trop grand pour entrer dans un registre), l'UAL va mettre le bit de débordement du FLAG à 1.
II-3 ) Unité de contrôle et commande :
Synchronisée par le signal de l'horloge, c'est elle qui déclenche les événements dans le processeur (on peut remarquer à ce sujet qu'elle est connectée à toutes les autres composantes du processeur). Par exemple, quand une information passe dans un bus, cette information est destinée à un seul endroit (par exemple, un registre). C'est donc l'unité de commande et de contrôle qui va "déverrouiller" l'entrée de cette destination pour que l'information qui circule sur le bus puisse y entrer (et ne pas entrer ailleurs en même temps).
Il s'agit donc essentiellement d'un automate exécutant les différentes séquences propres à chaque instruction. Cet automate peut être réalisé de plusieurs façons (câbler ou micro-programmer et dans les deux cas le jeu d'instructions est fixe). La plupart des unités de traitement sont micro- programmées et donc à jeux d'instructions fixes.
III ) Fonctionnement d'un système à base de microprocesseur :
III-1 ) Les interruptions :
Les interruptions permettent au matériel (périphérique) de communiquer avec le processeur. Dans certains cas, on désire que le processeur réagisse rapidement à un évènement extérieur : arrivée d'un paquet de données sur une connexion réseau, frappe d'un caractère au clavier, modification de l'heure. Les interruptions sont surtout utilisées pour la gestion des périphériques de l'ordinateur, en effet les systèmes à base de microprocesseurs peuvent comporter plusieurs éléments matériels tels que l'écran, les lecteurs de CD, lecteurs de DVD, les ADC (Analog to digital converter) et DAC (digital to analog converter ) etc...mais la majorité de ces périphériques n'ont besoin du microprocesseur qu'à certains moments. Si un périphérique nécessite une intervention, il génère lui-même une demande d'interruption.
Une interruption est signalée au processeur par un signal électrique sur une borne spéciale. Lors de la réception de ce signal, le processeur (traite) l'interruption dès la fin de l'instruction qu'il était en train d'exécuter. Le traitement de l'interruption consiste soit :
- à l'ignorer et passer normalement à l'instruction suivante : c'est possible uniquement pour certaines interruptions, nommées interruptions masquables. Il est en effet parfois nécessaire de pouvoir ignorer les interruptions pendant un certain temps, pour effectuer des traitements très urgents par exemple. Lorsque le traitement est terminé, le processeur démasque les interruptions et les prend alors en compte.
- à exécuter un traitant d'interruption (interrupt handler). Un traitant d'interruption est un programme qui est appelé automatiquement lorsqu'une interruption survient. L'adresse de début du traitant est donnée par la table des vecteurs d'interruptions (voir chapitre interruption).
Remarque :
Parfois le microprocesseur est sollicité par plusieurs interruptions en même temps, pour répondre à ces appels un ordre de priorité est souvent pris en compte pour leurs traitements.
Les interruptions augmentent considérablement l'efficacité du processeur.
Les interruptions sont de deux types :
* Interruption matérielle.
* Interruption logicielle.
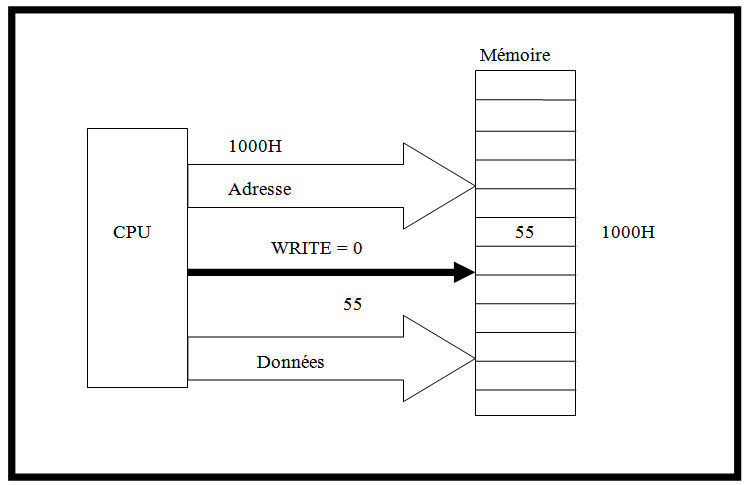
III-2 /L'écriture en mémoire (WRITE):
Pour écrire une donnée dans la mémoire le microprocesseur doit placer l'adresse de la donnée sur le bus d'adresses (son emplacement dans la mémoire) puis il place la donnée sur le bus de données et enfin génère le signal WRITE (ordre d'écriture dans la mémoire).
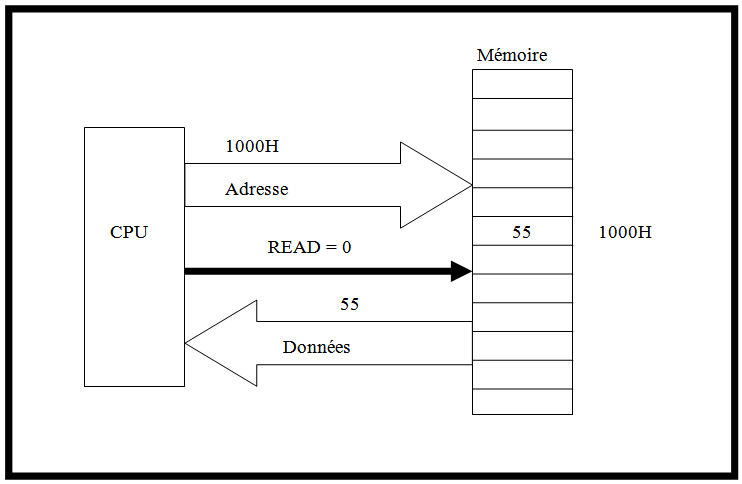
III-3 ) La lecture de la mémoire (READ):
Pour lire une donnée de la mémoire le microprocesseur doit connaître son emplacement, en effet il dépose son adresse sur le bus d'adresses puis génère le signal READ (il demande une opération de lecture de la mémoire) alors la donnée sera acheminée vers le microprocesseur à travers le bus de données. La donnée sera stockée dans un registre dans le microprocesseur.
Remarque :
Si la donnée est un code opératoire d'une instruction alors elle sera logée dans le registre d'instructions sinon elle sera logée dans un registre de données (en général l'accumulateur)
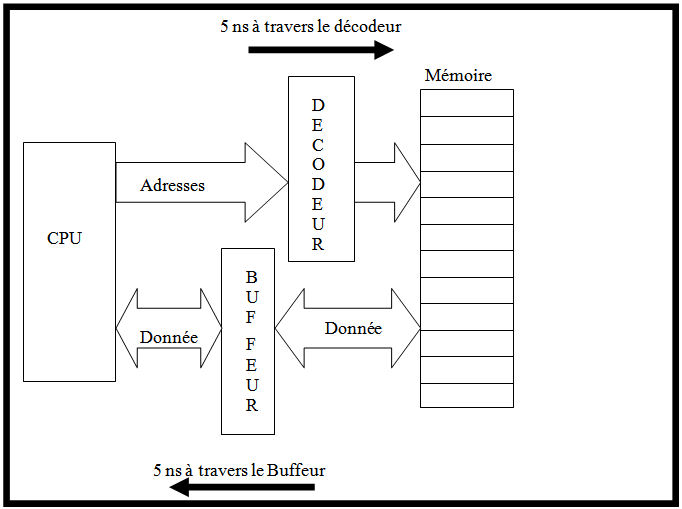
III-4 ) Wait Stat (temps d'attente pour la synchronisation) :
Le Wait Stat n'est qu'un temps d'attente qu'il faut donner à certains périphériques pour terminer leurs opérations (Notamment la mémoire), en effet en général dans la plupart des systèmes à base de microprocesseur on trouve toujours des circuits intermédiaires entre la CPU et la mémoire comme le montre la figure suivante :
Ces circuits entraînent toujours des temps de retard supplémentaires ce qui oblige le microprocesseur à utiliser des Wait Stat (temps de retard) pour synchroniser les transferts entre la mémoire et la CPU .la figure précédente montre que le microprocesseur perd environ 10 ns pour avoir l'information à cause du décodage et la bufférisation du bus.
Remarque :
Parfois le microprocesseur utilise plus qu'un seul Wait Stat pour synchroniser avec ces périphériques (tout dépend du temps que le périphérique demande pour achever son fonctionnement)
III- 5 /Communication avec les entrées/sorties :
Il peut s'agir d'un flux d'informations de l'extérieur vers l'ordinateur (Acquisition via le clavier, une connexion réseau, un disque dur, etc...), ou d'un flux de l'ordinateur vers l'extérieur (écran, réseau, disque, etc...).
Les données échangées entre un périphérique et le processeur transitent par l'interface (ou contrôleur) associé à ce périphérique .L'interface possède de la mémoire tampon pour stocker les données échangées (suivant le type d'interface, cette mémoire tampon fait de 1 seul octet à quelques Méga-octets).L'interface stocke aussi des informations pour gérer la communication avec le périphérique :
- des informations de commande, pour définir le mode de fonctionnement de l'interface: sens de transfert (entrée ou sortie), mode de transfert des données (par scrutation ou interruption), etc. Ces informations de commandes sont communiquées à l'interface lors de la phase d'initialisation de celle-ci, avant le début du transfert.
- des informations d'état, qui mémorisent la manière dont le transfert c'est effectué (erreur de transmission, réception d'informations, etc). Ces informations sont destinées au processeur.
Lors de l'exécution des instructions d'entrées/sorties, le processeur met à 1 sa borne IO/M et présente l'adresse E/S sur le bus d'adresse. Le signal IO/M indique aux circuits de décodage d'adresses qu'il ne s'agit pas d'une adress en mémoire principale, mais de l'adresse d'une interface d'entrées/sorties.
Remarque :
La communication entre le microprocesseur et les interfaces d' entrées/sorties peut être série (sur un seul fil bit par bit) ou parallèle (sur plusieurs fils)
III -6 ) Accès direct à la mémoire (DMA)
Lorsqu'un transfert en mémoire est nécessaire de la mémoire RAM à un port d'E/S, la CPU lit le premier octet en mémoire et le charge dans l'un des registres du microprocesseur. La CPU écrit ensuite l'octet rangé précédemment sur le port d'E/S approprié.
Il en résulte que le microprocesseur effectue des opérations de lecture et d'écriture répétées. Ainsi un certain temps est perdu entre le traitement de chaque octet. Pour remédier à ce problème, une procédure est mise au point pour l'accès direct à la mémoire (Direct Memory Acess), qui permet de transférer des données de la mémoire RAM au port d'E/S sans passer par le microprocesseur. Pour cela, un contrôleur DMA, qui reprend le rôle de la CPU, c'est à dire qu'il gère les transferts de la RAM aux ports d'E/S.