Dimensionnement moteur en ligne
Outil de dimensionnement des moteurs en ligne pour les robots, voitures électriques … tout système de traction à base de moteurs à courant continu. Calcul de la puissance moteur et batterie pour votre projetEntrées:
Résultat:
Sources: RobotShop. 2013. « Drive Motor Sizing Tool »
Démonstration:
Démonstration:
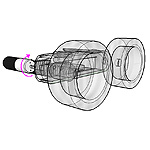
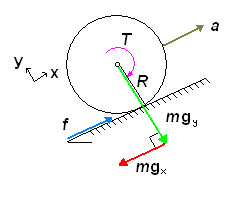
Cette démonstration est destinée à compléter l'outil de calcul en vous offrant étape par étape, des explications sur les calculs derrière l'outil dynamique. Dans l'image ci-dessous, une moitié robot mobile est affichée.

Bien que, dans ce scénario, deux seulement des quatre roues sont entraînées, les équations ci-dessous peuvent être utilisées pour n'importe quel nombre de roues motrices et passives, ainsi que pour la capacité de la batterie. Les équations sont présentées sans unités (les unités sont présentées avec l'outil de sélection de moteur d'entraînement).
Afin de rouler sur une surface horizontale, les moteurs d'un robot à roues doivent produire suffisamment de couple pour surmonter les imperfections de la surface ou des roues, ainsi que la friction dans le moteur lui-même. Donc théoriquement, un robot (petit ou grand) ne nécessite pas beaucoup de couple pour se déplacer sur une surface purement horizontale. Évidemment, il y aura plus de friction et de résistance dans un grand robot que dans un petit robot.
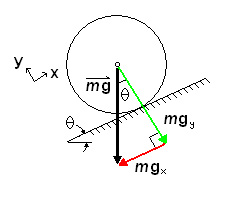
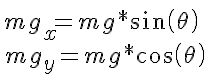
Pour un robot qui roule sur un plan incliné à une vitesse constante (pas d'accélération ou de décélération), il doit produire suffisamment de couple pour " contrer " l’effet de la gravité. Sur une surface inclinée (à un angle thêta) un seul élément de son poids (mgx parallèle à la surface) provoque le déplacement vers le bas. L'autre composante, mgy est équilibrée par la force normale à la surface exercée sur les roues.
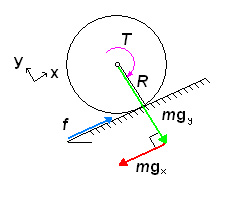




Puissance totale (P) par moteur peut être calculée en utilisant la relation suivante :


Note: Ceci est la batterie nécessaire par moteur. Pour obtenir un pack de batterie totale requise pour le robot, il faut multiplier cette valeur par le nombre d’entraînement.
Sources: RobotShop. 2014. « Drive Motor Sizing Tutorial »
Cours microcontrôleurs

Le cours présente dix leçons qui sont composés de la même façon : un aperçu théorique, concernant les connaissances et les schémas correspondants. En vue d’améliorer et d’évaluer les compétences techniques dans la matière, un support de travaux dirigés, accompagne ce livre, sera indispensable afin d’attendre les objectifs pédagogiques de cette formation.
Liste des auteurs
| Mr. Nizar TOUJANI |