![]()
![]()
![]() Chapitre 2
Chapitre 2
LES SYSTEMES DE TELECOMMUNICATIONS
Lorsque l'on aborde le problème des télécommunications on est amené à faire usage de deux termes : réseau et système.
Si la notion de réseau est directement associée à la mise en relation d'un ensemble plus ou moins vaste de terminaux (hommes ou machines) entre eux, le concept de système se rapporte essentiellement aux moyens de télécommunications mis en oeuvre pour constituer des réseaux. Les systèmes sont en quelque sorte les supports des réseaux. On peut définir un système comme un ensemble cohérent de moyens mis en oeuvre pour réaliser tout ou partie des fonctions des télécommunications.
Suivant cette terminologie on distingue, en général, dans le domaine des télécommunications, deux grands systèmes spécifiques . les systèmes de transmission et les systèmes de commutation. Nous rappellerons dans les pages qui suivent les caractéristiques essentielles de ces deux grandes catégories de systèmes.
Auparavant nous ferons encore remarquer, pour éviter une certaine confusion entre les notions de système et de réseau qu'un seul système de télécommunications peut être utilisé comme support de plusieurs réseaux. C'est le cas le plus souvent pour les systèmes de transmission à grande distance. Il y a deux raisons essentielles à cela : tout d'abord la technique de transmission a évolué très rapidement et a permis de transmettre aisément sur une même artère des types d'informations différentes (téléphone, télex, téléinformatique, et même télévision). En second lieu, les économies d'échelle sont particulièrement importantes en transmission et il ne serait pas rationnel d'utiliser un système de transmission pour chaque type d'information à transmettre.
En commutation, le problème est différent car l'évolution technique a été beaucoup moins rapide qu'en transmission et, jusqu'à présent tout au moins, la spécialisation est demeurée la règle (centraux téléphoniques, centraux télex, centraux de téléinformatique ... ). Cependant, le développement de la commutation électronique temporelle, de la commutation de paquets, l'apparition de la commutation temporelle asynchrone modifient progressivement, comme nous le verrons plus loin, les données du problème et permettent d'envisager désormais des systèmes universels de commutation.
Si un seul système de télécommunications peut être utilisé comme support de plusieurs réseaux, inversement il peut y avoir unicité de réseau et diversité de systèmes, à condition toutefois que la normalisation des paramètres d'interconnexion, des interfaces et, le cas échéant, des logiciels soit assurée. On soulignera, à ce propos, le rôle fondamental joué, en matière de normalisation, par un organisme international tel que l'Union internationale des télécommunications (UIT) et, plus spécialement, par le Comité consultatif international télégraphique et téléphonique (CCITT). Le service universel téléphonique n'a été rendu possible, au plan mondial, que grâce à cette normalisation internationale des systèmes de télécommunications.
2. 1. Les systèmes de transmission
Les systèmes de transmission comprennent essentiellement les lignes de transmission proprement dites, c'est-à-dire les supports de transmission et les équipements de groupement des signaux à transmettre. Ce groupement est appelé multiplexage. Il en existe deux types : le multiplexage en fréquence et le multiplexage en temps.
2. 1. 1. Lignes de transmission
Ces lignes de transmission peuvent être de nature très diverse (câbles, liaisons hertziennes, liaisons par satellites). Le cas des radiocommunications, notamment avec les mobiles, mérite cependant d'être examiné à part.
Actuellement, pour les liaisons entre stations fixes de télécommunications, on peut classer les supports de transmission en cinq grandes catégories techniques. En effet, on ne citera que pour mémoire les liaisons radioélectriques en ondes courtes, dont le rôle a été important, avant l'apparition des câbles sous-marins téléphoniques et des liaisons par satellites, mais qui n'occupent plus, aujourd'hui, qu'une place marginale dans l'arsenal des moyens de transmission à grande distance. Ces supports de transmission, à courte ou à grande distance, qui constituent l'ossature actuelle des réseaux de télécommunications sont : les câbles à paires symétriques, les câbles coaxiaux, les faisceaux hertziens, les satellites artificiels et les fibres optiques.
Les câbles à paires symétriques
Il s'agit de lignes bifilaires groupées à l'intérieur de câbles le plus souvent souterrains mais, parfois encore, aériens, dont la capacité varie en fonction du nombre d'abonnés à raccorder ou du trafic à écouler. Ces types de câbles sont utilisés essentiellement dans les réseaux locaux, soit pour le raccordement des abonnés à leur centre de rattachement, soit pour des liaisons intercentraux, urbaines ou rurales. En général, les câbles à paires symétriques sont utilisés pour la transmission de signaux à faible ou moyenne largeur de bande (téléphone, télex, transmissions de données à moyen débit), mais on peut aussi les utiliser pour des transmissions de signaux à plus large bande (vidéo) sur de courtes distances.
Les câbles coaxiaux
Ils ont régné pendant longtemps sur le domaine des liaisons terrestres à grande distance et des liaisons intercontinentales par câbles sous-marins. Ils sont utilisés aussi pour des « réseaux locaux à large bande », réseaux de télévision par câble, notamment, ou pour des liaisons interactives de vidéocommunication.
Les faisceaux hertziens
Les faisceaux hertziens sont d'utilisation plus récente que les câbles coaxiaux. Ces derniers sont apparus à la fin des années 1930, alors que les faisceaux hertziens n'ont commencé à se développer qu'au lendemain de la Seconde Guerre mondiale, à la fin des années 1940. Ils ont joué un grand rôle, tant dans le domaine des liaisons à grande distance, en concurrence avec les câbles coaxiaux, que dans celui des liaisons régionales à moyenne distance. Leur rôle a été très important, aussi bien dans les pays industrialisés que dans les pays en développement. Une caractéristique essentielle de l'évolution des liaisons à grande distance par câbles coaxiaux et par faisceaux hertziens pendant les 30 années qui ont suivi la Seconde Guerre mondiale a été la course aux économies d'échelle. Les économies d'échelle sont particulièrement importantes en télécommunications, notamment en transmission. D'où l'accroissement rapide des capacités de transmission des liaisons par câbles coaxiaux (tableau 2.1) et par faisceaux hertziens (tableau 2.2).
Tableau 1 : Câbles coaxiaux (AT& T)
| TYPE |
ANNÉE D'INTRODUCTION DANS LE RÉSEAU |
NOMBRE DE VOIES TÉLÉPHONIQUES PAR CANAL |
NOMBRE MAXIMAL DE VOIES PAR ARTÈRE |
| L 1 L 3 L 4 L 5 |
1940 1953 1967 1973 |
600 1860 3600 10800 |
1800 16740 32400 108000 |
| On notera, en particulier, la très forte augmentation de capacité entre le système L 4 et le système L 5. |
|||
Le système T D2 n'est pas le seul système mis au point et exploité par le Bell System. Le système T H 1 (1959) a une capacité de 7 canaux, de 1 860 voies téléphoniques chacun; la combinaison de ces deux systèmes sur une même artère permet donc d'atteindre des capacités de 30 000 voies, au lieu de 3 000 voies au début des années 50.
Tableau 2 : Faisceaux hertziens type T D2 (AT&T)
| ANNÉE D'INTRODUCTION DANS LE RÉSEAU |
NOMBRE DE VOIES TÉLÉPHONIQUES DE CANAUX |
NOMBRE PAR CANAL UTILISABLES |
CAPACITÉ MAXIMALE DE L'ARTÈRE |
| 1948 1953 1960 1967 1968 1973 |
480 600 600 900 1200 1500 |
5 5 10 10 10 11 |
2400 3000 6000 9000 12000 16500 |
Les satellites artificiels
L'ère des télécommunications par satellites artificiels a commencé en 1962 (première liaison transatlantique par satellite de télécommunication, le 11 juillet 1962, entre Andover, aux États-Unis et Pleumeur-Bodou, en France). Les premiers satellites ont été d'abord des satellites à défilement (orbites basses et excentrées), Très rapidement on a été capable de lancer des satellites dits géostationnaires (orbite circulaire et rotation du satellite en synchronisme avec celle de la Terre).
Les satellites artificiels ont révolutionné non seulement les télécommunications intercontinentales (possibilité de transmission simultanée de voies téléphoniques et de canaux de télévision) mais aussi, comme chacun sait, la météorologie, la navigation, la télédétection et la télésurveillance à objectifs civils ou militaires. D'autre part, l'apparition de satellites de diffusion directe de télévision apporte encore une dimension supplémentaire aux satellites de télécommunications, Le domaine de prédilection des satellites de télécommunications est, bien entendu, celui des liaisons à très grande distance, intercontinentales d'abord, puis continentales et mêmes nationales, notamment pour les pays de grande étendue (États-Unis, ex-URSS, Inde, Indonésie, etc.).
Les fibres optiques
Le dernier en date des grands supports de transmission est le câble à fibres optiques : les premières liaisons expérimentales remontent à 1977. Elles ont connu, en une décennie, un développement fulgurant, aussi bien dans le domaine des liaisons intercontinentales par câbles sous-marins (mise en service du premier câble sous-marin transatlantique, TAT8, en décembre 1988) que pour les liaisons terrestres à grande distance, où elles remplacent progressivement les liaisons par câbles coaxiaux et par faisceaux hertziens, tout au moins dans les pays développés, En ce qui concerne les réseaux locaux à faible ou à large bande (téléphone, télévision) l'introduction des liaisons par fibres optiques est plus lente, essentiellement pour des raisons de coût, mais il ne fait aucun doute que, là aussi, les fibres optiques finiront par s'imposer, notamment, pour la construction de réseaux locaux multiservices ou multimédias.
2. 1. 2. Systèmes de multiplexage
On dispose actuellement de deux grands procédés de multiplexage : le multiplexage en fréquence et le multiplexage en temps, auxquels il convient d'ajouter le multiplexage en longueur d'onde qui prendra de plus en plus d'importance avec l'introduction des techniques optiques.
Multiplexage en fréquence
L'apparition du multiplexage en fréquence remonte au début des années 1930. Ce procédé de groupement des canaux (systèmes à courants porteurs) a dominé la technique des transmissions pendant un demi-siècle. La caractéristique principale de l'évolution technique, au cours de cette période a été l'augmentation considérable de capacité de ces systèmes (de 600 voies par canal au lendemain de la Seconde Guerre mondiale à 10800 voies au début des années 1970). Le multiplexage en fréquence a conforté le règne de l'analogique, commencé avec l'invention du téléphone par Graham Bell en 1876.
Multiplexage en temps
L'idée du procédé de multiplexage en temps n'est pas récente : on se rappellera, notamment, le système de télégraphie multiple inventé par le français Émile Baudot, en 1877. Cependant, le multiplexage en temps ne se développera qu'en parallèle avec le codage de la parole. Le grand mérite de cette novation revient à un français, Alec Reeves, qui déposa en 1938, un brevet de base sur ce que l'on appellera Plus tard la modulation par impulsions et codage (MIC).
En fait, ces systèmes ne deviendront vraiment opérationnels qu'après l'apparition de circuits intégrés à semiconducteurs (début des années 1960 aux États-Unis - système MIC à 24 voies ; milieu des années 1960 en France - système MIC à 32 voies). Depuis le début des années 1970, les systèmes numériques de transmission ont pris progressivement la relève des systèmes analogiques. Ils, sont utilisés sur tous les supports de transmission (câbles à paires symétriques pour liaisons intercentraux, câbles coaxiaux et faisceaux hertziens à grande distance, liaisons par satellites de télécommunications, liaisons par fibres optiques).
En effet après avoir été introduite dans les réseaux locaux (liaisons entre centraux) au milieu des années 1960, la « numérisation » a gagné progressivement les liaisons à grande distance. Les premières réalisations apparaissent vers le milieu des années 1970 : expérimentation du système T4M aux États-Unis (274 Mbit/s par canal, capacité du câble : 32000 voies téléphoniques) (1975), puis, en Europe, les premières liaisons à 140 Mbit/s par canal coaxial apparaissent à la fin des années 1970. Dans le domaine des faisceaux hertziens il en est de même, au Japon notamment, où les transmissions numériques sur faisceaux hertziens (bande des 10 GHz) se développent rapidement vers la même époque.
D'une façon générale, on peut dire que les systèmes de transmission numérique sont aujourd'hui prépondérants dans tous les grands réseaux de télécommunications, alors que les « systèmes analogiques » sont en régression rapide. Ainsi, dès le début de 1990, le taux de numérisation du réseau interurbain français, c'est-à-dire le ratio nombre de circuits numériques/nombre total de circuits, atteignait 75 %..
En ce qui concerne les satellites de télécommunications, les câbles sous-marins, les liaisons par fibres optiques, nous avons pensé qu'étant donné l'extraordinaire progression des techniques correspondantes, ces moyens de télécommunications méritaient des développements particuliers.
En revanche, les radiocommunications classiques (ondes longues et ondes courtes) ne présentent plus, sauf en radiodiffusion, qu'un intérêt rétrospectif pour les télécommunications proprement dites. Nous nous contenterons à leur sujet d'un bref rappel historique. Au contraire, nous exposerons plus en détail dans le cadre des services de télécommunications, l'essor remarquable des radiocommunications avec les mobiles.
2. 1. 3. Les liaisons radioélectriques - Rappel historique
Les radiocommunications en ondes hertziennes longues ou courtes constituent un cas un peu particulier dans la panoplie des systèmes de télécommunications. On distinguera notamment :
Ø les radiocommunications unidirectionnelles, c'est-à-dire, essentiellement, la radiodiffusion (sonore ou télévisuelle);
Ø les radiocommunications de personne à personne (en général bidirectionnelles, mais parfois unidirectionnelles, qui ressortent plus du domaine des télécommunications proprement dites.
Ainsi que nous l'avons déjà indiqué, nous nous limitons à un bref rappel historique de ce dernier cas, laissant de côté tout le secteur de la radiodiffusion qui mériterait, à lui seul, un développement spécial (tableau 2.3).
Tableau 2. 3. - Les liaisons radioélectriques
Ø 1901 : Transmission à travers l'Atlantique du premier message radio par Marconi.
Ø 1907 : Ouverture à l'exploitation, par Marconi, des premières liaisons radioélectriques en ondes longues.
Ø À partir de 1920 : Important développement des liaisons radiotélégraphiques en ondes longues.
Ø 1926 : Ouverture des premières liaisons radiotélégraphiques en ondes courtes.
Ø 1927 : Ouverture de la première liaison radiotéléphonique transatlantique (Londres - New York),
Ø À partir de 1945 : Du fait des progrès technologiques, les liaisons radioélectriques inter-continentales connaissent un important développement et permettent d'offrir de nouveaux services : (liaisons spécialisées, télex, etc.).
Ø À partir de 1960 : Par suite du développement de nouveaux moyens de transmission (câbles sous-marins téléphoniques, puis satellites de télécommunications), le rôle des liaisons radioélectriques décroît rapidement. À la fin des années 1970, il n'existe pratiquement plus de liaisons radioélectriques intercontinentales.
2. 1. 4. Les télécommunications par satellite
Historique
L'idée d'utiliser des satellites artificiels pour les télécommunications a été émise, pour la première fois, en 1955, par un chercheur des Bell Telephone Laboratories, J.R. Pierce. Dans un article publié par la revue Jet Propulsion et intitulé « Orbit radio relay », Pierce proposait d'utiliser des satellites géostationnaires (Un satellite géostationnaire est un satellite de la Terre, à orbite équatoriale circulaire, dont la période de révolution est égale à la période de rotation de la Terre : un tel satellite paraît fixe par rapport à la Terre. Son altitude est d'environ 36 000 km) pour assurer des liaisons à très grande distance. Il faudra, en fait, une dizaine d'années avant que cette idée puisse réellement se concrétiser. Cependant quelques expériences furent entreprises dès la fin des années 1950. À la fin de 1958, (un an après le lancement du sattellite soviétique Spoutnik 1), les États-Unis lançaient sur orbite basse le premier satellite de télécommunications SCORE (Signal Communication by Orbiting Relay Equipment); mais il ne s'agissait que d'un relais à transmission différée, réémettant, par télécommande, un message reçu et enregistré antérieurement.
Les premiers essais réalisés avec des satellites à haute altitude ont utilisé le satellite réflecteur « Écho I », ballon plastique, métallisé, de plus de 30 mètres de diamètre, lancé en août 1960 par la NASA sur une orbite d'une altitude moyenne de 1500 km.
Plusieurs expériences de télécommunications furent réalisées avec Echo I, entre les Etats-Unis et la France. Ces expériences ont permis, en particulier, de vérifier les conditions de propagation, notamment à incidence rasante. Cependant, les véritables expériences de télécommunications ne commencèrent qu'après le lancement de Telstar 1 par la NASA, en juillet 1962. Le satellite, construit par les Bell Telephone Laboratories, comportait un répéteur actif de télécommunications émettant quelques watts; il gravitait sur une orbite elliptique dont l'apogée était situé au-dessus de l'hémisphère Nord à environ 5000 kilomètres d'altitude, ce qui assurait des durées de visibilité mutuelle de l'ordre d'une demi-heure entre l'Europe occidentale et l'Est des États-Unis.
Sous l'impulsion de M. Pierre Marzin, directeur du CNET, l'administration française des PTT construisit en un temps record (octobre 1961 - juillet 1962), grâce à la collaboration de l'AT&T et des Bell Telephone Laroratories, une station terrienne à Pleumeur-Bodou (Côtes-d'Armor, anciennement Côtes-du-Nord). Cette station, identique à la station de l'AT&T située à Andover (Maine), était opérationnelle au début de juillet 1962 et put capter, dans la nuit du 10 au 11 juillet, à 0 h 47 très exactement, les premières images de télévision en provenance des États-Unis. Quelques heures plus tard, la station britannique installée de l'autre côté de la Manche, en Cornouailles, recevait, elle aussi, les premières images transmises au-dessus de l'Atlantique.
Plusieurs satellites de télécommunications dits « à défilement », par opposition aux satellites géostationnaires, furent lancés par les États-Unis après Telstar I : ce furent, en 1963-1964, Relay I, puis Telstar II, puis Relay II, dont l'apogée s'est élevé jusqu'à 10000 kilomètres, augmentant ainsi la durée de visibilité mutuelle entre stations de part et d'autre de l'Atlantique.
Télécommunications par satellite (station de Pleumeur-Bodou)
Dans la nuit du 10 au 11 juillet 1962 est établie, pour la première fois au monde, une liaison de télécommunications par satellite artificiel (Telstar). Des images de télévision sont transmises entre la station américaine d'Andover et la station française de Pleumeur-Bodou. Ces photographies représentent le Radome et la grande antenne de la station de Pleumeur-Bodou, lors des premières transmissions effectuées en juillet 1962.
Un grand pas fut franchi lorsque l'on démontra la possibilité de maintenir un satellite stationnaire par rapport à la Terre, ce qui fut fait avec les satellites Syncom, notamment Syncom III qui permit de retransmettre, en 1964, les images des jeux Olympiques de Tokyo. Cette même année, quatorze pays formaient à Washington le Consortium international de télécommunications par satellite, Intelsat. Enfin, en avril 1965, c'était le lancement du premier satellite géostationnaire, Intelsat 1 (Early Bird). Ce satellite, mis en exploitation expérimentale dès juin 1965, avait une capacité de transmission de 240 voies téléphoniques ou d'un canal de télévision.
Le lancement du premier satellite de télécommunications géostationnaire, Intelsat I, en 1965, marque le véritable début de l'ère des télécommunications par satellite, qui commence donc une dizaine d'années après l'apparition des premiers grands câbles sous-marins téléphoniques. Dès l'origine, les satellites de télécommunications ont été utilisés, soit séparément, soit simultanément, pour la téléphonie et la télévision, ce qui n'est pas le cas des câbles sous-marins. D'autre part, l'utilisation des satellites permettait aux pays continentaux, n'ayant pas d'accès direct à l'océan, d'établir leurs liaisons intercontinentales sans transiter par un ou plusieurs pays.
Ainsi, les satellites de télécommunications ont apporté immédiatement aux télécommunications à très grande distance, non seulement de nouveaux moyens pour écouler le trafic téléphonique, mais aussi de nouvelles possibilités que les seuls câbles sous-marins n'étaient pas à même de procurer (télévision, liaisons directes entre pays continentaux ... ).
Depuis 1965, le développement des télécommunications par satellite a suivi pas à pas le développement des techniques de mise sur orbite et le perfectionnement des satellites et des stations terriennes. De 240 voies téléphoniques (ou un canal de télévision) pour les satellites Intelsat I et II (1965-1967) on passe, avec Intelsat III (19681970) à 1200 voies téléphoniques (et un canal de télévision), puis, avec la génération Intelsat IV (1971-1973), à 4000 voies téléphoniques (et deux canaux de télévision) et même 6 000 voies téléphoniques avec Intelsat IVA (1976). Le lancement des premiers satellites de la génération Intelsat V au début des années 1980 permettra de franchir une nouvelle étape dans la course aux performances (12 000 voies téléphoniques et deux canaux de télévision) (fig. 2.1).
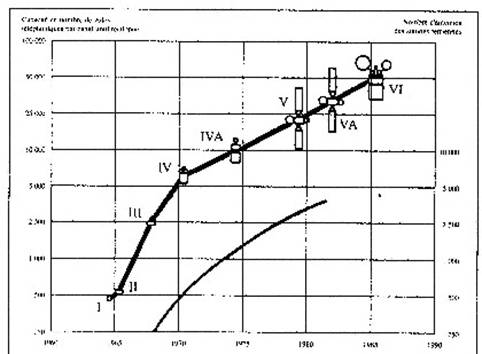
Figure 2. 1. : Évolution de la capacité des systèmes de télécommunications
par satellite (1965 - 1985).
Satellite Telecom 2
Le satellite Telecom 2A, représenté ici, est le premier exemplaire de la nouvelle génération de satellites de télécommunications de France Telecom; il a été lancé le 17 décembre 1991 depuis le centre de Kourou en Guyane, Telecom 2A, puis Telecom 2B, ont pour tâche d'assurer la continuité des services de Telecom 1A, et Telecom 1C. Plus puissants et disposant d'une plus longue durée de vie (dix ans au lieu de sept), les satellites de la nouvelle génération sont dotés d'un nombre accru de répéteurs (26 au lieu de 12).
Cependant le développement et le perfectionnement des techniques de télécommunications par satellite ne s'apprécient pas uniquement en fonction de critères quantitatifs. Par exemple, à partir de la génération Intelsat II (1967), il a été possible de disposer de ce qu'on appelle l'accès multiple, qui permet à un groupe de stations terriennes d'être reliées deux à deux grâce à un seul satellite, alors qu'avec Intelsat I, seules des liaisons point à point étaient possibles. Des perfectionnements ont encore été apportés, par la suite, au principe d'accès multiple : au lieu d'affecter de façon rigide les circuits entre les différentes stations, on met en pool un certain nombre de circuits constitués par l'ensemble des porteurs, du système et, lorsqu'une station désire un circuit, elle choisit un porteur parmi ceux disponibles à l'instant considéré, et le libère dès que la communication est terminée. Il existe d'ailleurs deux types possibles d'accès multiple : l'accès multiple à répartition en fréquence (AMRF) et l'accès multiple à répartition dans le temps (AMRT), plus récent et plus efficace.
La souplesse d'exploitation des satellites de télécommunications s'est donc développée en même temps que leur capacité de transmission s'accroissait. Alors qu'un câble sous-marin est essentiellement une artère point à point, un système de télécommunications par satellite apparaît comme un réseau doté non seulement d'une fonction de transmission, mais aussi, sous une forme particulière, de certaines fonctions s'apparentant à la commutation.
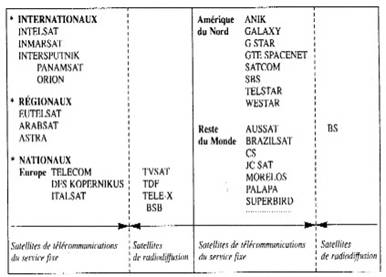
En une trentaine d'années, le développement des satellites artificiels a été prodigieux. On se rappellera que le premier satellite artificiel, le satellite soviétique Sputnik 1, a été lancé en 1957. Depuis cette date, le nombre de satellites lancés chaque année a crû dans des proportions considérables. Un chiffre donne une idée de l'ampleur du phénomène : en 1985, on dénombrait en orbite quelque 3000 satellites de toute nature. Entre 1977 et 1985, c'est-à-dire en l'espace de huit ans seulement, près de 900 satellites ont été lancés. En 1989, le nombre de satellites placés en orbite a été de 136. Dans le domaine particulier des satellites de télécommunications, les progrès ont été également impressionnants, tant au plan quantitatif qu'au plan qualitatif. On compte aujourd'hui plus de trente systèmes internationaux, régionaux ou nationaux de télécommunications par satellite. Le tableau 2.4 en donne une liste.
Tableau 2. 4. Systèmes à satellites
Le système Intelsat
Parmi ces grands systèmes, le premier et le plus important est incontestablement Intelsat, organisme créé en 1964 par quatorze pays, très exactement le 20 août, c'est-à-dire deux ans seulement après l'établissement de la première liaison transatlantique par satellite. Fin 93 cette organisation regroupait cent vingt-neuf pays.
Au début de 1968, le réseau Intelsat ne comptait encore que onze pays équipés de stations terriennes; le nombre total d'antennes était alors de 14 seulement. À la fin de 1975, soixante douze pays étaient desservis par le réseau Intelsat, qui comportait 114 stations terriennes équipées de 141 antennes. En 1989, Intelsat, qui fonctionne en quelque sorte comme une « coopérative », comprenait cent dix sept associés. Son capital atteignait 1,6 milliard de dollars. 13 satellites étaient en service en mars 1989 : 7 sur l'océan Atlantique, 3 sur l'océan Indien et 3 sur le Pacifique. On comptait, à cette date, 600 stations terriennes installées dans 170 pays. Le nombre total d'antennes était de 812. Enfin, le nombre de circuits téléphoniques établis par l'intermédiaire d'Intelsat atteignait, à cette même date, 54000.
Les années 80 ont été marquées par les satellites de la cinquième génération (Intelsat V). Le premier satellite de cette série a été lancé en décembre 1980 et le dernier en janvier 1989. Les satellites de la sixième génération (Intelsat VI) ont pris la relève en octobre 1989 et la septième génération (Intelsat VII) en octobre 1993.
On notera, enfin, la très grande fiabilité des télécommunications par satellite. En ce qui concerne plus spécialement Intelsat, depuis la mise en service de Early Bird en juin 1965, la disponibilité des liaisons par satellite a dépassé 99,9 % du temps.
On trouvera dans le tableau 2.5 les principales caractéristiques de chacune des générations de satellites Intelsat, mais on notera que tous ces satellites ont en commun les caractéristiques suivantes.
Ø Interconnexion bande C (6/4 GHz) bande K (14/11-12 GHz), c'est-à-dire que l'on peut utiliser indifféremment chaque bande dans chaque sens (trajets montant et descendant).
Ø Couverture globale (zone entière, Atlantique, par exemple), « hémizone » (séparation en deux zones, par exemple : Atlantique côté Amérique du Nord et Atlantique côté Europe), ou pinceaux fins (surtout pour transmissions de télévision ou de données).
Ø Réutilisation de fréquence (dans un même satellite) :
- par polarisations circulaires inverses ou polarisations linéaires orthogonales.
- par découplage géographique.
En ce qui concerne les capacités de transmission des satellites Intelsat, elles dépendent aussi, comme dans d'autres systèmes, des types de modulation, voire des dispositifs de compression utilisés. On peut dire cependant, que les largeurs de bande disponibles sur chacun des satellites Intelsat VI, par exemple, permettent d'acheminer en transmission numérique, au moins 18000 circuits téléphoniques (ou 36000 voies téléphoniques unidirectionnelles).
Tableau 2. 5. Principales caractéristiques des satellites Intelsat
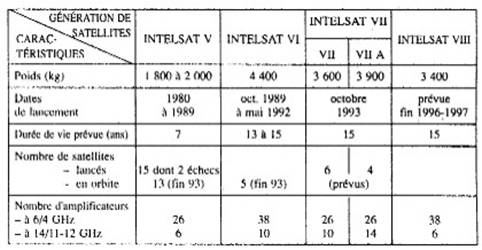
Ce tableau montre une certaine homogénéité des satellites Intelsat depuis la 5ème génération. On notera cependant que les durées de vie prévues ont doublé depuis la 6ème génération et que le poids se réduit depuis Intelsat VI pour des performances accrues (44 amplificateurs et 3400 kg pour la future génération Intelsat VIII).
Les différents domaines des télécommunications par satellite
Sans mentionner le domaine des télécommunications militaires, les télécommunications par satellite peuvent être, aujourd'hui, réparties en cinq domaines d'utilisation :
Ø les télécommunications internationales établies au moyen de grandes stations type standard A, B ou C vers divers pays, que celles-ci soient des stations de téléphonie ou des International Multiservices Gateways de type IBS (Intelsat Business Services);
Ø les télécommunications domestiques de téléphonie qui utilisent soit des satellites spécifiques et domestiques, tels que Arabsat, Morellos, Aussat, Palapa, Brazilsat, soit des satellites loués, comme Intelsat, pour réaliser des liaisons interurbaines et/ou désenclaver des villages (téléphonie rurale);
Ø les télécommunications d'entreprise qui sont en plein essor et qui utilisent essentiellement des supports numériques multiservices, voire uniquement des données;
Ø la télévision d'entreprise (business TV) utilisée en liaison avec de la diffusion de données ou en complément de stations d'entreprise, pour diffuser des cours de formation, des présenterions de produits, etc.;
Ø les communications mobiles par satellite qui commencent à se développer de façon significative dans le monde, soit sur des satellites spécifiques (tels que Inmarsat), soit sur des satellites standards (Etats-Unis : Omnitracs).
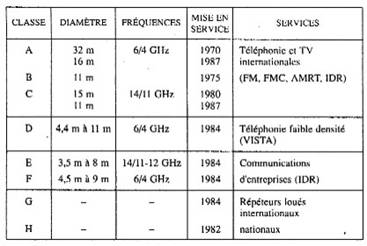
On trouvera sur le tableau 2.6, à titre d'information, les principales caractéristiques des stations terriennes et services d'Intelsat.
Tableau 2. 6. Classes de stations terriennes et services Intelsat
Tendances actuelles et perspectives d'avenir
Les liaisons internationales
Ce marché, qui fut le support essentiel des liaisons par satellite, a considérablement évolué au cours des deux dernières années en raison de la politique tarifaire d'Intelsat et de l'évolution des spécifications des stations standard A. Ces nouvelles spécifications permettent d'utiliser des antennes de 16 à 18 mètres, là où des antennes de 32 mètres étaient requises autrefois. Ces nouvelles antennes, plus petites, sont notablement moins coûteuses que les anciennes (environ 3 fois moins), le nombre de nouveaux projets a sensiblement augmenté, permettant la reprise d'un marché qui tendait à être en régression.
Avec l'introduction du service IDR (Intermediate Data Rate), utilisant des porteuses numériques entre 64 kbit/s et 2, voire 34 Mbit/s, Intelsat a introduit une nouvelle politique tarifaire : Intelsat ne facture plus à la communication, mais au canal 64 kbit/s. Cela contribue fortement au développement de systèmes à concentration de circuits DCME (Data Circuit Multiplication Equipement). Ce type d'équipement, dont les algorithmes ont été spécifiés par Intelsat, combine un codage de la voix 32 kbit/s (ADPCM) et l'utilisation des silences de parole; il en résulte un gain substantiel permettant de « passer » jusqu'à cinq communications téléphoniques simultanées sur un seul canal 64 kbit/s et d'amortir le coût d'un équipement DCME en moins de douze mois.
Les systèmes « Domsat »
La demande dans ce secteur d'activité est très forte, mais le marché dans les pays en voie de développement ou d'industrialisation est encore limité par leur situation économique. Les techniques numériques s'introduisent aussi bien dans les petites que dans les grandes stations :
Ø stations interurbaines de moyen trafic constituant souvent un réseau plus ou moins maillé,
Ø stations distantes faisant le plus souvent partie d'un réseau étoilé au centre duquel on trouve une station, dite principale.
Les communications d'entreprise
Ces stations sont utilisées pour tout type de trafic : visioconférences, transfert de données (fichiers volumineux), réseau téléphonie (liaisons PABX), secours terrestre (disaster recovery) ou lignes spécialisées pour les liaisons interactives de données. Là encore on doit distinguer deux types de stations
Ø les stations à fort trafic (> 64 kbit/s),
Ø les stations de données à faible ou moyen trafic « 64 kbit/s).
Pour les liaisons interactives de données, les débits sont faibles « 64 kbit/s) et les réseaux ont une structure en étoile et prennent pour nom générique VSAT (Very Small Aperture Terminal). Enfin, les réseaux maillés doivent permettre de constituer des liaisons entre centres de décision régionaux. Une caractéristique de ce type de réseau est la nécessité d'une grande flexibilité dans l'allocation des ressources de trafic et la création de liaisons temporaires.
Pour bénéficier d'un potentiel de maillage élevé on tend, là aussi, à utiliser une technique AMRT (Accès Multiple à Répartition dans le Temps).
La vidéotransmission à usage professionnel
Aujourd'hui cette application est basée sur une technique de transmission analogique avec systèmes d'embrouillage pour assurer la confidentialité des programmes transmis. L'arrivée des techniques de compression de l'image et de transmission numérique permettra une meilleure intégration des fonctions et la disponibilité de capacités d'adressage et de cryptage.
Les mobiles
On trouve aujourd'hui plusieurs types de réseaux internationaux en service, dont le plus important est le système Inmarsat qui va exploiter la troisième génération de satellites. Il rassemble soixante douze pays membres. Inmarsat estime que le nombre de terminaux en service atteindrait 200000 en 1998 avec le système actuel. Sous l'impulsion de la FFC, des projets de systèmes mobiles mondiaux par satellites, en orbite basse, sont à l'étude. Ils pourraient voir le jour à la fin de la décennie et constitueraient alors la composante spatiale du FPLMTS (Future Public Land Mobile Telecommunications System) (Iridium, Globalstar, Odyssey, Inmarsat, P21, ... ).
2. 1. 5. Les télécommunications par fibres optiques
En une dizaine d'années, les systèmes de télécommunications par fibres optiques sont passés des premières expériences sur le terrain à un très grand développement. Ils supplantent aujourd'hui les systèmes classiques de transmission urbaine et interurbaine et ont commencé à pénétrer le domaine des réseaux locaux (distribution).
Historique
L'idée d'utiliser la fibre optique comme support de propagation remonte au milieu des années 1960. Mais les affaiblissements de transmission étaient alors prohibitifs. Les Bell Telephone Laboratories réalisent en 1970 le premier laser à semiconducteur fonctionnant à température ambiante et Corning Glass annonce la réalisation de fibres optiques avec un affaiblissement de 20 dB/km, soit 100 fois moins important que ce qui était possible auparavant. Ces deux innovations étaient remarquablement complémentaires puisque la longueur d'onde d'émission du laser à arséniure de gallium correspondait au minimum (relatif) d'absorption de la fibre de silice. On commence à réaliser des fibres (multimodes), en 1974, dont l'atténuation est de 4 dB/km à 0,85 mm. La fiabilité des sources laser s'améliore : on peut envisager la réalisation de premières liaisons expérimentales. De 1978 à 1980, ce sont les premières liaisons prototypes qui voient le jour. En France, mise en service, en 1980 à Paris, d'une liaison de 7 km en fibres multimodes entre les centraux téléphoniques Tuileries et Philippe Auguste, sans répéteur (24 Mbit/s par fibre à 0,85 mm). Parallèlement s'ouvre une nouvelle perspective : celle de la réalisation de fibres à absorption minimale (légèrement inférieure à 0,2 dB/km à 1,55 mm) en configuration monomode avec la possibilité de sources et détecteurs basés sur la technologie du phosphore d'indium. Ces perspectives vont se concrétiser et ouvrir des possibilités immenses aux liaisons par fibres optiques.
L'apparition des premières liaisons par fibres optiques, à la fin des années 1970, marque le début d'une ère nouvelle pour les systèmes de transmission. Les liaisons par Libres optiques concerneront d'abord les liaisons terrestres à grande distance et les liaisons intercentraux. L'introduction dans les réseaux locaux sera plus lente. Mais c'est sans doute dans le domaine des liaisons sous-marines que l'introduction des fibres optiques sera la plus spectaculaire. Le premier grand câble transatlantique (TAT8) sera mis en service en décembre 1988. La photographie ci-dessus représente un câble sous-marin à fibres optiques avec soit armure en acier.
Dans la situation actuelle, deux domaines sont à examiner : d'une part, les liaisons terrestres à grande distance et les liaisons intercentraux et, d'autre part, le réseau local, ou réseau de distribution.
Liaisons à grande distance et liaisons intercentraux
La fibre monomode à base de silice s'est imposée : elle est maintenant proche de ses limites de performance théorique avec un affaiblissement de 0,4 dB/km à 1300 nm et un minimum à 1550 nm 0,2 dB/km. Il existe deux grandes catégories de fibres; la fibre dite standard, dont la dispersion chromatique est nulle aux environs de 1300 nm, et la fibre dite à dispersion décalée, dont la dispersion chromatique s'annule à 1500 nm, Les liaisons installées jusqu'à présent l'ont été avec des fibres standards, la dispersion décalée commençant à être utilisée pour les liaisons à très grande distance. Les débits de 140 Mbit/s ont succédé aux débits initiaux de 34 Mbit/s et la course aux très grands débits a commencé : on atteint maintenant 560 Mbit/s, tandis que les premières liaisons dites « synchrones » à 2,5 Gbit/s sont en cours d'installation. La longueur d'onde porteuse est de 1300 nm ou de 1550 nm, les distances entre répéteurs atteignant plusieurs dizaines de kilomètres. Il est important de noter l'ouverture récente d'un nouveau segment de marché en forte progression, celui des liaisons sous-marines sans répéteurs, qui s'apparente à celui des liaisons terrestres à grande distance puisque, par définition, seul le câble est immergée La progression de ce segment de marché découle directement des progrès faits récemment dans le domaine des fibres optiques, autorisant des bonds d'une centaine de kilomètres ou plus. Il s'agit des liaisons du type Angleterre-Irlande, France-Angleterre, Espagne-Maroc... De telles liaisons ont été installées récemment à 140 Mbit/s. À moyen terme, elles seront portées au débit de 560 Mbit/s, En réponse à des appels d'offres très récents (1993), on note les premières propositions à 2,5 Gbit/s. Les liaisons sous-marines sans répéteurs présentent un très grand intérêt, en particulier dans deux cas :
Ø densité géographique relativement importante, d'îles d'éloignement moyen de 100 à 200 km. Exemple : Méditerranée orientale, certaines zones du Sud-Est asiatique...,
Ø conjugaison d'un relief interne montagneux avec un important kilométrage de côtes. L'exemple le plus caractéristique est celui de l'Italie où, plutôt que d'établir des liaisons terrestres fort coûteuses en génie civil, on préfère installer un réseau en feston ou en marguerite le long des côtes.
Réseaux locaux
Comme on l'a souligné, les premiers systèmes de transmission par fibres optiques ont relié les centraux téléphoniques entre eux dans les zones urbaines, ou un central à une tour hertzienne sur des distances de l'ordre de la dizaine de kilomètres. Une plus grande pénétration de l'optique dans les systèmes de télécommunications pouvait se faire suivant deux directions, les liaisons interurbaines et très longue distance d'une part, le réseau local d'autre part. Les opérateurs dont le réseau interurbain nécessitait, au début des années 80, une rénovation, ont tout naturellement choisi la première approche. En raison des progrès rapides des performances (débit, distance entre répéteurs), les systèmes à fibres optiques monomodes se sont très rapidement imposés d'un point de vue économique en éliminant totalement les systèmes sur cuivre. L'introduction de la fibre optique dans le réseau local est nettement plus lente, principalement à cause des forte,; contraintes économiques associées. En effet, si l'utilisation du réseau est restreinte au seul téléphone, le coût global de la ligne d'abonné en fibre optique doit être, au plus, égal à celui de la « paire de cuivre ». Ce n'est pas encore le cas, loin de là, sauf pour les liaisons spécialisées pour les « gros professionnels », mettant en oeuvre des débits importants. Les contraintes de coût sont plus faciles à satisfaire dans la perspective de mettre en place un réseau multiservice combinant la voix, les données et les images animées. La France a joué un rôle de pionnier clans cette approche (expérimentation de Biarritz), qui l'ait l'objet de nombreuses études et démonstrations de la part des opérateurs et des industriels des télécommunications.
En dehors des diverses et souvent difficiles questions réglementaires sur l'utilisation multiservice des réseaux (avoir le même réseau pour les services téléphoniques et la distribution de programmes de télévision notamment) subsistent des problèmes de réalisations en conformité avec les objectifs de coût. C'est pourquoi différents types d'architecture et différents scénarios d'évolution des systèmes à fibres optiques dans le réseau local sont en cours d'examen et d'expérience sur site. Pour avoir, à court ou moyen terme, des systèmes à fibres optiques compétitifs pour les usagers résidentiels, on est amené à n'installer, dans un premier temps, la fibre optique que sur une partie du réseau local (du centre de commutation aux répartiteurs locaux, par exemple) de façon à partager son coût entre plusieurs usagers. On parle ainsi de « fibre jusqu'au trottoir » et de « fibre jusqu’au pied de l'immeuble » en attendant la « fibre jusqu'à l'appartement ». A souligner que les techniques de transmission numériques pour la voix et les données devront coexister avec les techniques analogiques de transmission de l'image animée pendant encore de très nombreuses années. Le tout-numérique ne pourra en effet être mis en oeuvre que lorsque le parc des récepteurs de télévision aura été numérisé.
2. 1. 6. Les câbles sous-marins et les liaisons intercontinentales
Les liaisons sous-marines intercontinentales ont vu, ces de années, leur architecture évoluer de la simple structure point à point vers des structures plus compliquées de telle sorte que l'on peut réellement parler de « systèmes » sous-marins. C'est ainsi que les liaisons transatlantiques (et transpacifiques) en cours de développement constitueront un ensemble maillé facilitant, notamment, la sécurisation.
Ces notions de sécurisation, disponibilité, fiabilité sont pour les liaisons sous-marines au coeur des préoccupations, plus encore que pour les autres types de liaison. Les systèmes sous-marins sont soumis à des contraintes d'environnement particulièrement sévères : les équipements sont souvent immergés à plusieurs milliers de mètres. La difficulté et le coût des réparations induisent, de la part des opérateurs, des exigences draconiennes pour la qualité et la disponibilité des systèmes. Pour fixer les idées, une liaison transatlantique de plus de 6000 km doit avoir une durée de vie de vingt-cinq ans, au cours desquels il y aura eu un maximum de trois réparations pour l'ensemble de la liaison. On imagine facilement que cela implique des fiabilités extrêmes pour les composants mis en oeuvre, On comprend aussi plus aisément pourquoi le marché des liaisons sous-marines est restreint à un nombre très limité d'industriels.
Les systèmes sous-marins jouent un très grand rôle dans les liaisons internationales et nécessitent, à ce titre, que l'on en rappelle brièvement l'évolution.
En premier lieu, il ne faut pas oublier que jusqu'au milieu des années 1950 les câbles existants ne pouvaient transmettre que des signaux télégraphiques. Le trafic téléphonique intercontinental s'effectuait par l'intermédiaire du réseau radioélectrique à ondes courtes.
Nous rappelons ci-dessous quelques dates marquantes de l'histoire des câbles sous-marins.
Ø Les câbles télégraphiques
1851 - Pose du premier câble télégraphique entre la France et l'Angleterre.
1866 - Après une dizaine d'années d'efforts et plusieurs tentatives infructueuses, une première liaison télégraphique transatlantique par câble sous-marin est établie entre l'Irlande et Terre-Neuve.
1866-1914 - Sous l'action énergique de compagnies publiques et privées le réseau de câbles sous-marins télégraphiques se développe rapidement et atteint près de 500000 km à la veille de la Première Guerre mondiale.
1920-1939 - Malgré la concurrence des liaisons radioélectriques, le réseau de câbles sous-marins télégraphiques continue à se développer. On comptera quelque 650000 km de câbles à la veille de la Seconde Guerre mondiale.
1955-1965 - Les câbles sous-marins télégraphiques sont progressivement abandonnés.
Ø Les câbles téléphoniques coaxiaux
1950 - Un premier câble sous-marin à amplificateurs immergés est posé par l'AT&T entre Key West et La Havane.
1956 - Mise en service de la première liaison téléphonique transatlantique par câble sous-marin entre l'Écosse et Terre-Neuve. Cette liaison, dénommée TATI, longue de 3350 km, comportait deux câbles (un pour chaque sens de transmission et 51 amplificateurs immergés, équipés de tubes à vide. La capacité était de 36 voies téléphoniques à 4 kHz (ou 48 voies à 3 kHz). Un second câble identique (TAT2) sera posé peu de temps après, entre la France (Penmarch) et Terre-Neuve. Viendront ensuite le TAT3 et le TAT4 (96 voies téléphoniques à 4 kHz ou 128 à 3 kHz - un seul câble coaxial pour les deux sens de transmission).
1970 - Une nouvelle étape est franchie avec l'utilisation d'amplificateurs transistorisés : TAT 5 entre les États-Unis et l'Espagne (Cadix) avec une capacité de 845 voies à 3 kHz. À la même époque la France et la Grande-Bretagne posent, elles aussi, de nombreux câbles dans différentes parties du monde, notamment en Méditerranée en ce qui concerne la France.
1975-1977 - Une nouvelle génération de câbles sous-marins à grande capacité appariât : les capacités dépassent 3000 voies (câbles régionaux : Marseille-Rome et Fratice-Angleterre). En 1976, une nouvelle liaison transatlantique est établie (TAT6 - France-États-Unis, 6500 km - 4000 voies téléphoniques). De leur côté, les anglais battent des records avec le câble Pencan 3 à 5520 voies (1977).
1987 - Le dernier câble sous-marin à câble coaxial de cette génération est mis en service entre les États-Unis et la Grande-Bretagne (TAT7 - 4200 voies).
Ces quelques rappels montrent l'extraordinaire essor de la technique des câbles sous-marins, notamment depuis l'utilisation d'amplificateurs immergés transistorisés. Le nombre de circuits téléphoniques par câbles sous-marins était de 5000 en 1965, de 50000 en 1975 et d'environ 150000 en 1990. On notera toutefois que la part des « circuits régionaux » atteignait, à cette date, près de 80 % du nombre total de circuits, régionaux et intercontinentaux.
Cette expansion des liaisons par câbles sous-marins est d'autant plus impressionnante qu'à partir du milieu des années 1960, l'avènement des télécommunications par satellite a permis de mettre en oeuvre de nouveaux et puissants moyens pour acheminer le trafic intercontinental. Mais la rapidité de croissance du trafic international est telle que câbles sous-marins et satellites sont devenus plus complémentaires que concurrents.
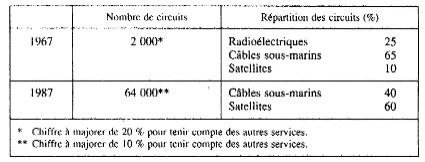
On trouvera tableau 2.7 l'évolution de la répartition du trafic téléphonique mondial (hors liaisons régionales) sur une période de vingt ans (1967-1987).
La croissance du trafic intercontinental est demeurée très forte jusqu'au début des années 1990 de l'ordre de 20 %.
Tableau 2.7. Évolution de la répartition du trafic téléphonique intercontinental
Les câbles sous-marins à fibres optiques
Les premiers essais de transmission par câbles sous-marins à fibres optiques datent du début des années 1980. En France, par exemple, une première liaison expérimentale, longue de 20 km, est établie entre Cagnes-sur-Mer et Juan-les-Pins en 1982 : la liaison ne comporte pas d'amplificateur et supporte deux systèmes à 34 Mbit/s. En avril 1984 est posée la liaison Port-Grimaud-Antibes (80 km deux amplificateurs immergés - deux systèmes 2 x 140 Mbit/s). Enfin, en 1987, est établie une première liaison continent-Corse par câble à fibres optiques, entre Marseille et Ajaccio (câble à deux paires de fibres optiques - une fibre par sens).
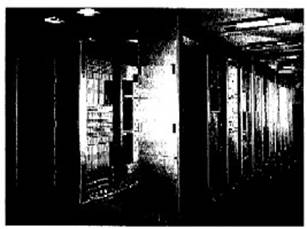
Mais l'événement le plus important est la mise en service, en décembre 1988, du premier câble sous-marin transatlantique à fibres optiques (TAT8) qui relie Tuckerton aux États-Unis (New-Jersey) à Penmarch en France et Widemouth en Angleterre. Pour la première fois aussi, une unité de dérivation, immergée en plein océan, au large des côtes françaises, permettait de réaliser un gigantesque « Y » horizontal (6 700 km entre Tuckerton et le point de dérivation - 520 km et 350 km, entre le point de dérivation et, respectivement, Widemouth et Penmarch).
On trouvera dans le tableau 2.8 quelques caractéristiques de cette importante réalisation. On notera, en particulier, qu'il s'est écoulé sept ans entre le lancement du projet et la mise en service effective de la liaison.
Tableau 2. 8. Caractéristiques du TAT8
La réalisation du TAT8 est, certes, une étape importante dans le développement des liaisons par câbles sous-marins à fibres optiques, mais ce n'est qu'une simple étape. Comme on l'a déjà signalé, ces dernières années ont vu l'essor des liaisons sans amplificateur intermédiaire. Citons notamment la mise en service, en 1989, d'un câble France-Angleterre à 6 paires de fibres à 140 Mbit/s. Plus important encore est la pose du premier câble « privé » transatlantique (PTAT pour Private TransATIantic) qui est la propriété de Mercury et de Cable and Wireless (2 systèmes à 420 Mbit/s). D'autres liaisons voient le jour à travers l'océan Pacifique (TC3 - Japon - Corée - Honk-Kong), ainsi qu'en de nombreuses autres régions du globe.
Un événement très important a été l'installation, en 1991, puis la mise en service en mars 1992 du TAT9. La structure est plus complexe que pour les liaisons transatlantiques précédentes. Deux points de la côte Est américaine (Manahawkin aux États-Unis et Pennant Point au Canada) sont reliés à trois atterrissements en Europe (Goonhilly en Angleterre, Saint-Hilaire-de-Riez en France, et Conil en Espagne) par l'intermédiaire de deux unités de dérivation. Le tout sur 9 600 km. Ces ensembles ne sont plus, comme pour TAT8, de simples éléments de connexion, mais de véritables multiplexeurs capables de brasser les groupes de voies pour les répartir entre les diverses fibres, en fonction de l'importance des trafics vers les différents pays. TAT9 est constitué de 2 systèmes à 560 Mbit/s. La capacité est donc double de celle de TAT8. La longueur d'onde porteuse est à 1,55 lirn, troisième « fenêtre optique » (la première à 0,85 mm et la deuxième à 1,3 mm). L'affaiblissement des fibres optiques à base de silice est au minimum (0,2 dB/km) pour 1,55 @m, ce qui permet d'avoir des pas entre régénérateurs supérieurs à 100 km.
TAT9, qui a marqué une nouvelle étape dans le développement des grands câbles sous-marins à fibres optiques, a été à l'origine d'un grand nombre d'autres réalisations parmi lesquelles nous citerons Tasman 2, entre l'Australie et la Nouvelle-Zélande, mis en service à la fin de 1991. De très nombreux systèmes à 560 Mbit/s sont en cours d'installation ou (le préparation augmentant énormément les capacités de transmission intercontinentales (par exemple TATIO et TATII en liaisons transatlantiques).
Pour les liaisons intercontinentales, la capacité des liaisons par satellite était, il y a quelques années, très supérieure à celle des liaisons sous-marines. L'avènement des systèmes à 560 Mbit/s a fait basculer la situation. Les liaisons par satellite gardent toutefois une complémentarité fort intéressante par rapport aux systèmes sous-marins pour les télécommunications à grande distance. Mais le rôle essentiel du satellite se situe dans le domaine de la diffusion (données, télévision ... ). Comme le démontre à l'évidence son évolution récente.
On aurait pu penser qu'après la récente introduction des systèmes à fibres optiques et le rapide passage de 280 Mbit/s à 560 Mbit/s, l'évolution technique des liaisons sous-marines allait marquer quelque Peu le pas. En fait c'est tout le contraire qui se produit à la suite de l’apparition des amplificateurs optiques.
Les câbles sous-marins.
Plusieurs caractéristiques sont à souligner pour cette nouvelle génération de systèmes qui constituera une révolution. En raison même des propriétés de l'amplification optique, le débit par système sera porté à 5 Gbit/s, ce qui représentera, par rapport à la génération TAT9, un gain atteignent presque un facteur 10.
Ils seront, de plus, compatibles aux normes SDH des nouveaux systèmes terrestres à haut débit et grande distance en cours d'installation, avec tout ce que cela suppose comme possibilités de reconfiguration de réseau d'exploitation et de maintenance.
Mais la caractéristique la plus importante de ces nouveaux systèmes est sans doute qu'ils ne comporteront plus de transformation optique-électrique et électrique-optique tout au long de la ligne. Il n'y a plus de régénération du signal et les équipements actifs immergés sont des répéteurs : ils amplifient et compensent ainsi l'absorption de la fibre, mais ne remettent pas en forme le signal. Cela simplifie largement le schéma du répéteur et élimine l'emploi de composants électroniques à très haut débit. Il est en revanche nécessaire de considérer la liaison comme un tout, puisqu'à chaque répéteur les distorsions et le bruit s'accumulent. On retrouve ainsi des problèmes bien connus pour les systèmes analogiques ce qui impose de modéliser et de simuler dans le détail la propagation du signal tout au long de la liaison pour en vérifier ensuite expérimentalement la validité dans des liaisons expérimentales dites « longues » (plusieurs milliers de kilomètres). Dans le cas où plusieurs industriels sont impliqués dans la réalisation d'une liaison, il est indispensable de définir, avec un degré accru de précision, les paramètres techniques à respecter pour garantir l'interfonctionnement des différents segments. Cet interfonctionnement est vérifié au cours de séries de test d'intégration qui ont débuté à l'automne 1992 pour les liaisons TAT12 et TAT13.
Une fois de plus, les systèmes sous-marins se placent à la pointe des évolutions techniques et technologiques en relevant le double défi des très hauts débits et de l'amplification optique, défi que nombre de spécialistes, il y a encore peu, n'hésitaient pas à qualifier d'utopique.
Mais il ne s'agit encore que d'une étape puisque l'on commence à parler de nouveaux systèmes à installer dans les années 1997-1998 avec des performances encore supérieures. On pense, pour les réaliser, à mettre en oeuvre les « solitons optiques », solutions singulières de la propagation dans les fibres, où les non-linéarités compensent la dispersion chromatique pour permettre à un type très particulier d'onde de se propager sans déformation sur de très grandes distances. Déjà de nouvelles perspectives s'ouvrent et de nouveaux développements sont à entreprendre ...
2. 2. LES SYTÈMES DE COMMUTATION
La commutation est, après la transmission, la deuxième grande fonction des réseaux de télécommunications.
Certes, la préoccupation essentielle des pionniers du téléphone était la transmission de la parole à distance, mais la fonction commutation a revêtu très vite une grande importance. En effet, si au début on pouvait se contenter de faire communiquer entre eux quelques usagers, en embrochant leurs postes sur une même ligne (principe de la ligne partagée) ou en les reliant deux à deux par des lignes directes, cela n'était plus possible lorsque le nombre de personnes susceptibles de communiquer entre elles dépassait la dizaine. Il était indispensable alors de mettre en oeuvre d'autres moyens : la fonction commutation s'imposait d'elle-même.
2. 2. 1. Le long règne des systèmes électromécaniques
C'est ainsi que l'on vit apparaître, deux ans seulement après l'invention du téléphone, le premier « standard » téléphonique manuel (New-Haven, États-Unis, 1878). La commutation téléphonique automatique n'allait pas tarder non plus à voir le jour, grâce à un inventeur aussi pittoresque que génial, Almon B. Strowger qui déposa en 1889, un brevet fondamental portant sur un sélecteur automatique : ce brevet, délivré en mai 1891, marque le point de départ de la commutation automatique.
Le développement du système Strowger et de ses diverses variantes a été considérable. Il ne faut pas oublier, par exemple, que ce système était encore à la base de l'équipement de beaucoup de réseaux téléphoniques dans les années 70, notamment en Grande Bretagne. Toutefois, dans les très grandes agglomérations, la commande par sélection directe présentait certains inconvénients. Cela conduisit les techniciens du Bell System à élaborer des dispositifs de commutation plus évolués utilisant des organes communs de commande (common control), qui faisaient appel à des fonctions plus complexes : fonctions de mémorisation (enregistreur), fonctions d'interprétation (traducteurs).
Deux grands systèmes virent le jour au lendemain de la Première Guerre mondiale, tous deux mis au point par le Bell System (à cette époque, l'ITT n'était pas encore séparée de l'AT&T) : le système Panel et le système Rotary. Le Panel fut réservé aux grandes villes américaines. Quant au Rotary, il fut développé surtout en Europe et équipa Paris à partir de 1928. Notons, en passant, la très grande durée de vie de ces deux systèmes : de l'ordre de cinquante-cinq ans, aussi bien pour le Panel aux Etats-Unis (1923-1978) que pour le Rotary en France (1928-1984).
Néanmoins, une nouvelle génération de centraux téléphoniques apparaît vers le milieu des années 30, avec le développement, sur une large échelle, des premiers autocommutateurs à barres croisées «crossbar). Mais, si l'avènement des systèmes crossbar marque une date importante dans l'histoire de la commutation téléphonique, on n'a pas affaire cependant à une véritable révolution technique : les systèmes de commutation demeurent électromécaniques. L'idée du commutateur à barres croisées est ancienne, puisqu'elle date de la Première Guerre mondiale; mais elle n'eut pas de suite pendant une vingtaine d'années, C'est le développement du système crossbar aux États-Unis qui incita plusieurs pays, en particulier la France et le Japon, à se lancer, vers le milieu des années 50, dans cette nouvelle technique, Cependant, de nombreux pays restèrent fidèles aux systèmes « pas à pas » de type Strowger.
En France, la décision d'équiper le réseau de systèmes crossbar date du milieu des années 50. Deux centraux prototypes furent installés, l'un en Pentaconta (système CGCT-ITT), à Melun en 1955, l'autre cri CP 400 (système L.M. Ericsson) à Beauvais, en 1956. Ces deux systèmes seront retenus pour l'équipement du réseau français. La solution adoptée, deux systèmes et non un seul, n'enthousiasmait pas les techniciens des télécommunications, mais il était difficile, dans le contexte industriel Français de cette époque, d'en choisir une meilleure,
2. 2. 2. La commutation électronique
Avènement et essor de la commutation électronique
Si, en transmission, l'évolution technologique a été spectaculaire au cours de la première moitié du vingtième siècle (on est passé de la ligne aérienne en fils nus aux câbles souterrains, puis aux câbles coaxiaux et aux faisceaux hertziens), il n'en a pas été de même en commutation, où le règne des systèmes électromécaniques, commencé en 1890, se prolongera jusqu'à la fin des années 60, soit plus de deux tiers de siècle après.
L'événement majeur, en commutation, sera l'apparition et l'essor de la commutation électronique qui bouleversera non seulement la conception des autocommutateurs mais aura, aussi, de profondes répercussions sur l'évolution et la structure des réseaux eux-mêmes. L'idée de remplacer les relais électromécaniques par des dispositif,-, électroniques, autrement dit les « contacts métalliques » par des « portes électroniques » paraissait très séduisante; elle ne semblait pas non plus poser de problèmes insolubles dès lors que l'on avait a sa disposition, non seulement des tubes à vide niais des transistors. En réalité, un temps relativement long s'est écoulé entre le début des recherches en laboratoire et le véritable démarrage industriel de la commutation électronique : près de vingt ans! L'affaire se révéla, en effet, beaucoup plus complexe que prévu, malgré l'importance des moyens et des programmes mis en jeu, notamment aux Bell Telephone Laboratories, qui furent les premiers à se lancer dans l'aventure. Un prototype de central électronique fut réalisé en 1960 aux États-Unis, mais le premier central vraiment opérationnel n'entrera en service qu'en 1965, à Succasunna, dans le New Jersey.
À la suite des Bell Telephone Laboratories, tous les grands organismes de recherches des pays industrialisés se lanceront eux aussi dans le développement de la commutation électronique. Les moyens mis en oeuvre seront considérables, car les problèmes à résoudre seront difficiles, tant au plan technologique qu'au plan des structures logiques : en effet, un central électronique est l'équivalent d'un très grand ordinateur qui doit réaliser, en outre, dans un temps extrêmement court, un nombre très élevé d'opérations.
En France, les premières recherches sur la commutation électronique ont été lancées par le CNET en 1957, donc bien après les Américains, qui avaient commencé une dizaine d'années auparavant. Mais les équipes de chercheurs du CNET, qui avaient déjà fait leurs preuves dans le codage de l'information et sa transmission sous forme numérique (modulation par impulsions et codage - MIC), s'engageront rapidement dans une voie originale, celle de la commutation électronique temporelle alors que les ingénieurs américains avaient opté, dès l'origine, pour la commutation électronique spatiale.
Les recherches du CNET en commutation électronique temporelle, commencées au Centre de recherches du CNET à Lannion au début des Sinisées 1960, aboutiront à la mise en exploitation d'un prototype à Perros-Guirec en 1970. Ce central fut, en fait, le premier au monde à utiliser ce type de commutation entièrement électronique. La France prendra, dans ce domaine, une avance importante et l'industrie française deviendra le premier fournisseur mondial de systèmes de commutation électronique temporelle. Peu à peu, tous les pays adopteront cette nouvelle technique, qui supplantera complètement la commutation spatiale dès la fin des années 80. Le tableau 2.9 donne un bref rappel historique des principaux événements qui ont marqué les recherches et le développement de la commutation électronique.
Tableau 2. 9. : Commutation électronique. Principaux événements
Ø 1945-1955 : Premières recherches sur la commutation électronique aux Bell Telephone Laboratories (Essais en laboratoire - ECASS - DIAD).
Ø 1958 : Essai, en laboratoire, aux Bell Telephone Laboratories d'un système de commutation électronique temporelle (ESSEX). Pas de suite industrielle.
Ø 1960 : Mise cri service, par les Bell Telephone Laboratories à Morris (Illinois - États-Unis) d'un premier central téléphonique en commutation spatiale. Prototype sans développement industriel ultérieur.
Ø 1905 : Mise en service, par l'AT&T, a Succasunna (New Jersey - États-Unis) du prototype industriel du système de commutation spatiale de l'AT&T (ESS 1).
Ø 1970 : Mise en service par le CNET, en Bretagne (Perros-Guirec, janvier 1970 et Lannion, juin 1970), des deux premiers centraux téléphoniques en commutation électronique temporelle (Système E 10).
Ø 1976 : Mise en service par l'AT&T, à Chicago, d'un très grand centre de transit interurbain (capacité pouvant atteindre 500 000 appels à l'heure) en commutation électronique temporelle (ESS 4).
Ø 1979 : Colloque international de commutation électronique (Paris - mai 1979). Tous les pays représentés à ce colloque (2 000 participants) confirment leur décision de passer définitivement de la commutation électronique spatiale à la commutation électronique temporelle de type numérique.
Ø 1987 : Le réseau numérique français de télécommunications est synchronisé au cours de cette année : l'ensemble du réseau est piloté par une horloge centrale d'une très grande précision (voisine de 10-12).
Ø 1990 : Tous les grands réseaux de télécommunications sont de plus en plus numérisés. La mutation la plus spectaculaire est celle du réseau français de télécommunications dont le taux de numérisation atteint déjà 75 %, aussi bien cri commutation qu'en transmission.
La commutation de circuits, en commutation spatiale et en commutation temporelle
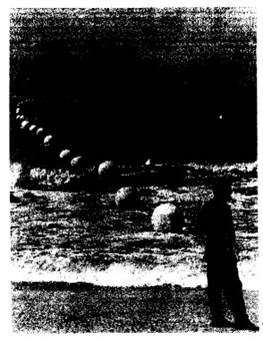
Tous les systèmes de commutation électromécanique sont basés sur le principe de la commutation de circuits qui a pour objet d'établir une liaison temporaire entre une ligne entrante dans le commutateur et une ligne sortante. Dans les systèmes électromécaniques, il y a une véritable continuité physique entre le circuit d'entrée et le circuit de sortie. On peut schématiser cette liaison temporaire sous forme d'une matrice de connexion (fig 2.3). Il y aura connexion entre une ligne entrante et une ligne sortante si les points de connexion correspondants (contacts de relais, par exemple) sont fermés. Si le point de connexion est ouvert (contacts de relais ouverts), la liaison n'est pas établie.
Figure 2.3. Principe d'une matrice de connexion.
La commutation de circuits n'est pas uniquement le fait des systèmes électromécanique. En commutation électronique, la commutation de circuits est aussi, en général, la règle mais on est amené à distinguer deux types de systèmes : la commutation électronique spatiale et la commutation électronique temporelle.
Rappelons que dans un autocommutateur électronique, on distingue d'une part les organes de commande (en général, calculateurs électroniques à programme enregistré) et, d'autre part, les organes de connexion (réseau de connexion au sens large du terme). On citera, pour mémoire, les organes périphériques qui assurent les liaisons entre les organes de commande et le réseau de connexion. La commutation électronique spatiale et la commutation électronique temporelle diffèrent essentiellement par la manière dont est réalisée la
fonction de connexion.
La commutation spatiale
Le principe de la commutation spatiale consiste à établir physiquement un chemin entre la ligne entrante et la ligne sortante. Ce chemin est obtenu en connectant bout à bout un certain nombre d'éléments de voie appelés mailles, au moyen de points de connexion à deux états : passant ou bloqué. Cette technique est donc très voisine de celle utilisée en commutation électromécanique, où les points de connexion sont des contacts métalliques. En commutation électronique spatiale, les points de connexion peuvent être électroniques mais ils sont encore, le plus souvent, matérialisés par des contacts métalliques.
Lorsque le chemin continu est établi, il permet le passage direct de la conversation ou des signaux entre la ligne entrante et la ligne sortante. Il est consacré à une seule communication pendant toute la durée de celle-ci. À chaque instant, un grand nombre de telles connexions sont établies simultanément à travers le réseau de connexion.
La fonction qui consiste à identifier les points de connexion à mettre au travail pour établir un chemin continu entre deux points donnés, sans interférer avec les connexions déjà établies, s'appelle 1a recherche d'itinéraire. Elle suppose que l'on a des moyens de connaître quelles mailles sont libres (non engagées dans un itinéraire établi), soit au moyen d'un test direct d'occupation de chaque maille, soit en consultant dans une mémoire l'état d'une, image du réseau de connexion.
La commutation temporelle
La commutation temporelle est d'une nature très différente de la commutation spatiale. Elle s'appuie sur le principe de la modulation par impulsions et codage (MIC). Suivant ce principe, la parole est transformée en trains d'impulsions (8 en principe) à un rythme de 8 000 par seconde et, sur un multiplex MIC primaire (le 32 voies, 32 de ces trains sont entrelacés dans une trame à 64 kbit/s.
La commutation temporelle (ou numérique) consiste à prélever, sur un multiplex MIC entrant, un des trains d'impulsions pour le réinjecter sur un multiplex MIC sortant. Si, par exemple, on veut relier la voie 2 d'un MIC entrant A à la voie 25 d'un MIC sortant B, il faut, pendant l'intervalle de temps 2, prélever sur le MIC A le train d'impulsions arrivant et, pendant l'intervalle de temps 25, le réinjecter sur le MIC B. Cela exige que, pendant le temps qui s'écoule entre ces deux intervalles, le groupe d'impulsions soit conservé en mémoire. L'ensemble de ce processus est répété 8 000 fois par seconde.
Avènement de la commutation électronique temporelle
L'avènement de la commutation électronique temporelle au début des années 1970 est à l'origine d'une mutation profonde des réseaux de télécommunications : la numérisation des réseaux. En effet, après l'essor des systèmes de transmission MIC (Modulation par Impulsions et Codage), l'apparition et le développement de la commutation temporelle électronique et numérique allaient permettre la réalisation de « réseaux intégrés » où toutes les informations seraient acheminées sous forme numérique. Cette photographie représente le central prototype Platon du système de commutation temporelle réalisé et mis en service par le CNET à Perros-Guirec et à Lannion en janvier et en juillet 1970.
La commutation temporelle consiste donc à changer la position dans le temps des signaux transportés par une voie MIC entrante, en les faisant séjourner pendant un temps convenable dans une mémoire temporaire (mémoire tampon).
Observation générale
En résumé, on peut dire qu'un système de commutation spatiale ne se distingue pas fondamentalement, en ce qui concerne la fonction connexion, d'un système de commutation électromécanique. Dans les deux cas, le circuit reliant la ligne entrante à la ligne sortante est, en quelque sorte, matérialisé dans l'espace, d'où le nom de commutation spatiales Autrement dit, les relations entre lignes entrantes et sortantes peuvent être représentées dans un système de coordonnées d'espace.
En commutation temporelle, comme nous venons de le voir, on ne peut plus matérialiser par un tracé purement spatial le circuit de connexion entre une ligne entrante et une ligne sortante; il faut ajouter aux coordonnées d'espace une coordonnée de temps. À l'intérieur du système de commutation temporelle, le circuit est, en fait, virtuel : pour le repérer, il faut connaître à la fois le groupement temporel auquel il appartient (coordonnées d'espace) et l'intervalle de temps qui lui est affecté à l'intérieur du multiplex temporel lui-même (coordonnées de temps).
En somme, si la commutation électronique temporelle n'est pas antinomique de la notion de commutation de circuits, en revanche, elle apporte, par son principe même, une dimension supplémentaire à la fonction commutation. En effet, son intérêt fondamental réside dans le fait qu'elle se situe, non pas dans un espace à trois dimensions mais, dans un espace-temps à quatre dimensions. En outre, comme nous le verrons plus loin, elle permet de mettre en oeuvre de nouveaux principes de commutation (commutation par paquets, techniques de transfert asynchrone ... ).
Développement des techniques spatiale et temporelle
La technique de commutation spatiale s'adaptait bien aux lignes individualisées en transportant une modulation analogique (lignes d'abonnés ordinaires ou circuits en bande de base). Ses modes de jonction avec les lignes étant les mêmes qu'en électromécanique, l'insertion dans un réseau ancien, en grande partie analogique, d'un centre de commutation spatiale ne soulevait pas de problèmes nouveaux.
La technique temporelle, au contraire, s'adapte parfaitement aux lignes se présentant dans des multiplex de transmission MIC, ce qui est, par exemple, le cas des circuits aboutissant à un centre de transit, lorsque l'environnement est déjà numérique. Lorsque les lignes à raccorder utilisent la transmission analogique, il est nécessaire de les numériser au préalable en utilisant des organes de conversion analogique/numérique appelés codecs (codeurs/décodeurs).
Depuis le début des années 1980, les techniques temporelles et numériques se sont progressivement imposées. En 1990, le réseau de télécommunications français était déjà numérisé aux trois quarts, aussi bien en commutation qu'en transmission.
La commutation de messages et la commutation de paquets
La commutation de paquets (ou par paquets) est un procédé de commutation récent; la commutation de messages, en revanche, est plus ancienne. Elle est apparue, en effet, avec le développement des ordinateurs au début des années 1950. On se rappellera qu'un commutateur électronique de messages est, en fait, un ordinateur capable de recevoir et d'enregistrer un message, en général télégraphique, de lui appliquer divers traitements, y compris la taxation, puis de le réémettre. La caractéristique principale de la commutation de messages est que le message est enregistré par le commutateur et réexpédié ultérieurement, ce qui apporte les possibilités suivantes :
Ø en cas d'encombrement sur les lignes sortantes, le message n'est pas perdu, mais retardé;
Ø si le commutateur détecte un incident empêchant ou perturbant la transmission, le message peut être répété;
Ø les messages peuvent être classés en différents ordres de priorité et les messages les plus urgents transmis les premiers;
Ø un même message peut être transmis successivement ou simultanément à plusieurs adresses.
L'ordinateur qui constitue le commutateur de messages peut en outre assurer certaines fonctions accessoires comme la taxation, les statistiques de trafic et l'archivage. En contrepartie, l'ordinateur exige le respect rigoureux d'un format précis pour les adresses et les indications de service. La commutation de messages est donc très souple et convient bien aux applications qui ne nécessitent pas le dialogue entre terminaux, comme dans le cas de la transmission de télégrammes.
La commutation de paquets est une forme de commutation par stockage et retransmission, mais qui s'applique à des paquets et non à des messages, et qui est beaucoup plus rapide (le temps de traversée du réseau est de l'ordre de la seconde). Les messages de données sont tronçonnés en blocs de taille déterminée, ne dépassant pas, en général, 128 octets (1024 bits), auxquels sont ajoutées des informations de service permettant d'identifier le message, son destinataire et la position du bloc dans le message. L'ensemble constitue un paquet.
Dans les commutateurs, les paquets sont stockés, puis retransmis à grande vitesse sur des circuits vers d'autres commutateurs, jusqu'au commutateur du destinataire.
Des paquets d'origine et de destination différentes sont transmis à la suite les uns des autres sur le circuit. Le rendement de ce circuit peut donc être très élevé. Par ailleurs, une procédure de détection et de correction d'erreurs y est mise en oeuvre pour atteindre un taux d'erreur résiduel très faible. Au commutateur d'arrivée, les paquets appartenant au même message de données sont rassemblés dans l'ordre initial pour être transmis au terminal destinataire (fig. 2.4). La commutation de paquets est particulièrement bien adaptée à la transmission de « données ». De nombreux réseaux ont vu le jour depuis une quinzaine d'années. C'est, en particulier, le cas du réseau français Transpac.
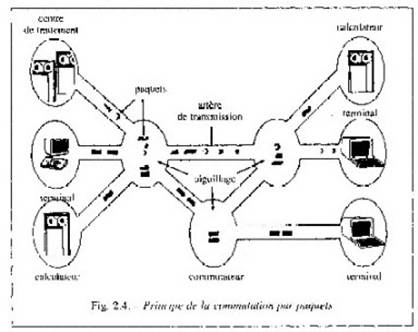
Figure 2. 4. : Principe de la commutation par paquets
On notera que Transpac utilise, en outre, la technique du circuit virtuel qu'on peut décrire de la façon suivante :
Ø si un terminal souhaite émettre un appel, il transmet une séquence comprenant notamment le numéro demandé;
Ø cette séquence, d'un format bien déterminé appelé paquet de demande d'appel, provoque la constitution, de proche en proche dans le réseau jusqu'au terminal appelé, d'un chemin logique appelé circuit virtuel;
Ø l'établissement de ce circuit virtuel correspond au marquage de l'itinéraire et à la réservation de mémoires tampons dans chaque commutateur traversé;
Ø si le terminal appelé accepte la communication, il transmet en retour un paquet de confirmation d'appel, qui effectue la même opération pour l'autre sens de transmission;
Ø ensuite, les données peuvent être échangées sous forme de paquets, entrelacés avec d'autres paquets au cours de la transmission, puis triés et réassemblés à l'arrivée.
Enfin, on ajoutera que les vitesses de transmission de deux terminaux mis en relation par un circuit virtuel pouvant être différentes, le réseau assure un contrôle de flux qui a pour effet d'asservir le terminal le plus rapide au terminal le plus lent.
L'ensemble des procédures décrites très schématiquement ci-dessus est normalisé par l'avis X25 du CCITT. Cette norme s'applique à l'interface entre les équipements d'abonnés en mode paquet et le réseau public de commutation par paquets : X25 comporte trois niveaux indépendants de protocoles ou interfaces. Actuellement, Transpac est le premier réseau mondial de transmission de données. À la fin de 1992, le nombre d'accès directs à Transpac atteignait 110 000, et le nombre de caractères véhiculés chaque mois par le réseau dépassait 320 milliards, dont 138 milliards pour le seul service Teletel (vidéotex).
![]()
![]()
![]()