Les Microcontrôleurs PIC
1- Introduction
Les microcontrôleurs sont aujourd'hui implantés dans la plupart des applications grand public ou professionnelles, il en existe plusieurs familles.
La société Américaine Microchip Technologie a mis au point dans les années 90 un microcontrôleur CMOS : le PIC (Peripheral Interface Controller). Ce composant encore très utilisé à l' heure actuelle, est un compromis entre simplicité d' emploi, rapidité et prix de revient.
- Les PIC existent dans plusieurs versions:
- les UVPROM qui sont effaçable par une source de rayonnements ultraviolets
- les OTPROM programmable une seule fois
- les E²PROM et flash EPROM qui sont effaçables électriquement.
2- Classification des PICs de Microchip
Actuellement les modèles Microchip, sont classés en 3 grandes familles, comportant chacune plusieurs références. Ces familles sont :
- Base-line : les instructions sont codées sur 12 bits.
- mid-line : les instructions sont codées sur 14 bits.
- High-End : les instructions sont codées sur 16 bits.
3- Identification des PICs
Un PIC est généralement identifié par une référence de la forme suivante : xx(L)XXyy-zz
| xx |
: |
famille du composant, actuellement « 12, 14, 16, 17 et 18 ». |
||
| L |
: |
tolérance plus importante de la plage de tension |
||
| XX |
: |
type de mémoire programme |
||
| C |
: |
EPROM ou EEPROM |
||
| CR |
: |
PROM |
||
| F |
: |
Flash |
||
| yy |
: |
Identificateur. |
||
| zz |
: |
vitesse maximale du quartz de pilotage. |
||
Exemple :
4- Tableau comparatif
| Mem prog en octets |
RAM en octets |
EEPROM en octets |
Fmax en MHz |
E / S |
Boîtier |
|
| 12C508 |
512x12 |
25 |
- |
4 |
6 |
8 broches |
| 16C72A |
2048x14 |
128 |
- |
20 |
22 |
28 broches |
| 16F84 |
1024x14 |
68 |
64 |
20 |
13 |
18 broches |
| 16F628 |
2028x14 |
224 |
128 |
20 |
16 |
18 broches |
| 16F876 |
8192x14 |
368 |
256 |
20 |
22 |
28 broches |
| 16F877 |
8192x14 |
368 |
256 |
20 |
33 |
40 broches |
Tableau 1 : Caractéristiques de quelques pics.
5- Architecture interne
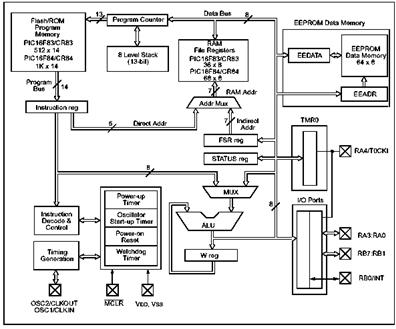
La figure 1 présente l'architecture du PIC 16F84, commune à la majorité des microcontrôleurs PIC. Le PIC 16F84 est un microcontrôleur 8 bits d'architecture de type RISC (Reduced Instructions Set Computer), signifie « calculateur à jeu réduit d'instructions ». Les instructions sont en effet au nombre de 35, soit une centaine de moins que le microcontrôleur 68HC11 de Motorola par exemple.
Figure 1 : Architecture interne du 16F84.
Parmi les principaux constituants, on remarque:
- la mémoire de type FlashROM pour le programme;
- la mémoire de type RAM pour les registres;
- la mémoire de type EEPROM pour les données à sauvegarder;
- des registres particuliers: W, FSR et d'état;
- l'Unité Arithmétique et Logique (ALU) ;
- les ports d'entrées / sorties;
- la pile à 8 niveaux.
5.1- La mémoire de programme
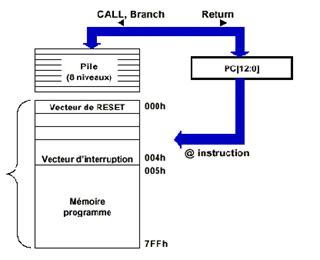
Comme son nom l'indique, c'est dans cette mémoire qu'est mémorisé le programme à exécuter. De type Flash ROM, elle est organisée en 1024 mots de 14 bits, ce qui permet de coder sur un seul mot l'instruction et l'opérande, à la différence des microcontrôleurs plus classiques à 8 bits où l'instruction et l'opérande sont écrits sur plusieurs adresses consécutives.
Chaque mot de cette mémoire programme est repéré par son adresse allant de 0 à 1023 (0 à 3FF en hexadécimal). Le Compteur Programme (PC) contient l'adresse de l'instruction à exécuter.
Figure 2 : Mémoire programme.
5.2- La pile
Ce terme désigne les emplacements mémoire où sont empilées les adresses de retour lors des appels à des sous-programmes. La pile ne comportant que 8 niveaux, il ne faut pas imbriquer plus de 8 sous-programmes.
5.3- Les registres
5.3.1- Organisation
La mémoire RAM de 68 octets est utilisée pour stocker des données temporaires. Baptisé du nom de registre à usage général par Microchip, chacune de ces mémoires est adressable directement. À ce bloc de 68 registres à usage général, le fabricant a associé 11 registres internes et organisé les adresses selon le tableau 2.
On remarque que les registres sont définis sur deux pages dont nous expliquerons l'accès au cours du paragraphe sur le registre STATUS.
| Adresses |
Registres |
Registres |
Adresses |
| 00 |
INDF |
INDF |
80 |
| 01 |
TMR0 |
OPTION |
81 |
| 02 |
PCL |
PCL |
82 |
| 03 |
STATUS |
STATUS |
83 |
| 04 |
FSR |
FSR |
84 |
| 05 |
PORTA |
TRISA |
85 |
| 06 |
PORTB |
TRISB |
86 |
| 07 |
87 |
||
| 08 |
EEDATA |
EECON1 |
88 |
| 09 |
EEADR |
EECON2 |
89 |
| 0A |
PCLATH |
PCLATH |
8A |
| 0B |
INTCON |
INTCON |
8B |
| 0C à 4F |
68 mémoires disponibles |
Accès aux mêmes mémoires que page 0 |
8C à CF |
| Page 0 |
Page 1 |
||
Tableau 2 : Organisation des registres.
Certains figurent dans les deux pages, ce qui peut faciliter la programmation.
5.3.2- Description des registres internes
* Registre INDF
Le registre INDF d'adresse 00 est utilisé pour l'adressage indirect. Pour expliquer ce mode d'adressage, il est plus facile d'expliquer le mode d'adressage direct.
Dans le mode direct, l'instruction comprend l'adresse effective de l'opérande. Exemple: ADDWF 8, 0 signifie additionner le contenu du registre W avec le contenu du registre d'adresse 08 et mettre le résultat dans W. Il est possible de faire la même opération en utilisant l'adressage indirect et le registre INDF par la ligne d'instruction ADDWF INDF, 0 en ayant mis préalablement 8 dans le registre FSR (File Selection Register) d'adresse 04.
* Registre TMRO
Le registre TMRO d'adresse 01 est lui aussi particulier puisqu'il constitue un compteur programmable incrémenté continuellement à une cadence constante indépendante de l'exécution du reste du programme. Après avoir atteint la valeur 255, le compteur reprend à 0. La cadence de l'incrémentation est proportionnelle à la fréquence de l'horloge appliquée au microcontrôleur ou à la fréquence du signal appliqué sur la broche 3 (RA4/TOCKI). Un prédiviseur permet de programmer cette proportion. Le fonctionnement de ce prédiviseur est géré dans le registre OPTION décrit dans le tableau 3.
| Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
| RBPU |
INTEDG |
TOCS |
TOSE |
PSA |
PS2 |
PS1 |
PSO |
| Tableau 3 : Registre OPTION. |
|||||||
À l'issue d'un Reset, tous les bits du registre OPTION sont à 1.
RBPU : (PORTB Pull Up enable bit) : ce bit à 0 permet la validation des résistances de tirage.
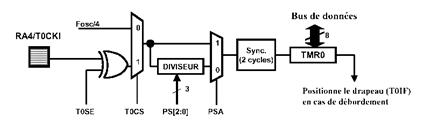
La figure 3 schématise les différentes possibilités d'incrémentation de TMRO.
Figure 3 : Fonctionnement de TMRO.
Prédiviseur non actif (PreScaler Assignement bit, PSA = 1)
La cadence de comptage est égale à la fréquence Fosc/4 si le bit TOCS (TMRO Clock Source) est à 0. Cette cadence est celle du signal appliqué à TOCKI si le bit TOCS est à 1. De plus, le bit TOSE (TMRO Source Edge) permet de choisir si l'incrémentation a lieu sur un front descendant ou sur un front montant (descendant si TOSE = 0 et montant si TOSE = 1).
Exemple:
Si nous utilisons un quartz à 4 MHz. Fosc/ 4 a donc une valeur de 1 MHz. Si TOCS = 0, la cadence de comptage est de 1 million d'incrémentations par seconde.
Prédiviseur actif (PSA = 0)
Le prédiviseur (tableau 4) permet de diviser la fréquence d'incrémentation Fosc/4 ou TOCKl selon l'effet voulu.
| PS2 |
PS1 |
PSO |
Diviseur |
| 0 |
0 |
0 |
2 |
| 0 |
0 |
1 |
4 |
| 0 |
1 |
0 |
8 |
| 0 |
1 |
1 |
16 |
| 1 |
0 |
0 |
32 |
| 1 |
0 |
1 |
64 |
| 1 |
1 |
0 |
128 |
| 1 |
1 |
1 |
256 |
Tableau 4 : Utilisation du prédiviseur avec le timer 0.
* Registre PCL et PCLATH
Le registre PCL d'adresse 02 contient les 8 bits de poids faible du PC qui est codé sur 13 bits. Lors d'opérations d'écriture dans le registre PCL, le nouveau compteur programme est calculé à partir des 8 bits du registre PCL et des 5 bits du registre PCLATH d'adresse OA.
* Registres PORTA et PORTB
Les registres PORTA d'adresse 05 et PORTB d'adresse 06 sont les registres des ports d'entrées/sorties. Chaque broche de chaque port peut être utilisée en entrée ou en sortie: le sens de fonctionnement des ports est défini par le contenu des registres TRISA et TRISB : un bit à 0 programme la broche correspondante en sortie, un bit à 1 la programme en entrée. Quand une broche est en sortie, son état est déterminé par le bit correspondant du registre du port. Quand une broche est en entrée, c'est son niveau qui détermine la valeur du bit du registre correspondant. Lors d'un Reset, les bits des registres TRISA et TRISE étant mis à 1, toutes les broches des ports A et B sont initialement des entrées.
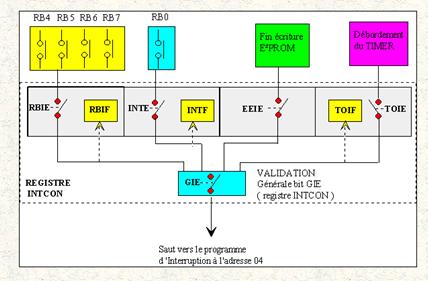
* Registre INTCON
Le registre INTCON d'adresse OB, présenté tableau 5, est utilisé pour le contrôle et la gestion des interruptions.
| Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
| GIE |
EEIE |
T0IE |
INTE |
RBIE |
T0IF |
INTF |
RBIF |
| Tableau 5 : Registre INTCON. |
|||||||
· Le bit RBIF, comme RB Interupt Flag, est mis à 1 lors d'un changement d'état sur une des lignes RB4 à RB7.
· Le bit INTF (lNTerrupt Flag), est mis à 1 si une interruption est générée sur RB0/INT.
· Le bit T0IF (Timer 0 lnterrupt Flag), est mis à 1 en cas de débordement du timer 0.
· Le bit RBIE (RB lnterulpt Enable), mis à 1, autorise les interruptions sur RB4 à RB7.
· Le bit INTE ( lNTerrupt Enable), mis à 1, autorise les interruptions sur RB0/INT. L'interruption a lieu sur le front montant de l'impulsion si le bit INTEDG, comme lNTerrupt Edge, du registre OPTION est à 1 ; elle a lieu sur le front descendant si ce bit est à 0.
· Le bit T0IE (Timer 0 lntmupt Enable), mis à 1 autorise les interruptions dues au débordement du timer 0.
· Le bit EEIE (EEPROM write completed lnterrupt Enable), autorise les interruptions de fin d'écriture dans l'EEPROM.
· Le bit GIE (Global lnterrupt Enable), mis à 1 autorise toutes les interruptions non masquées par leur bit individuel.
À la lecture de la signification de ces bits, on notera que le 16F84 possède 4 sources potentielles d'interruptions:
- un changement d'état sur les broches RB4 à RB7;
- une source externe via la broche RB0/INT ;
- le débordement du timer 0 ;
- la fin de l'écriture dans l'EEPROM de données.
Chaque indicateur de changement d'état RBIF, INTF, RTIF doit être remis à 0 par le logiciel dans le programme de traitement de l'interruption.
Lors d'un Reset, tous les bits du registre INTCON sauf RBIF sont mis à 0. RBIF garde son état précédent.
Un seul vecteur d'interruption étant disponible à l'adresse 0004, le programme d'interruption doit déterminer éventuellement quelle est la source d'interruption.
Figure 4 : Synoptique des modes d'interruptions.
* Registres EEDATA, EEADR, EECON1 et EECON2
Les registres EEDATA, EEADR, EECONI et EECON2 sont utilisés pour la lecture et l'écriture dans l'EEPROM. L'utilisation de quatre registres pour ces opérations est en fait assez simple.
Le registre EEDATA d'adresse 08 contient, selon l'opération, la donnée lue ou la donnée à écrire. Le registre EEADR d'adresse 09 contient son adresse. Le registre EECON1 d'adresse 88 définit le mode de fonctionnement de l'EEPROM. Le registre EECON2 d'adresse 89 n'est pas physiquement implanté et ne sert qu'à la sécurisation lors de la phase d'écriture. L'EEPROM ne contenant que 64 octets d'adresse 00 à 3F, les 2 bits de poids fort de EEADR sont donc toujours à 0.
Le registre EECON1 d'adresse 88 est décrit tableau 6.
| Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
| EEIF |
WRERR |
WREN |
WR |
RD |
|||
| Tableau 6 : Registre EECON1. |
|||||||
· Le bit RD (Read Data), doit être à 1 pour lire une donnée. Il est automatiquement remis à 0 à l'issue.
· Le bit WR (WRite data), doit être à 1 pour écrire la donnée. Il est automatiquement remis à 0 à l'issue.
· Le bit WREN (WRite Enable), doit être à 1 pour autoriser l' écriture.
· Le bit WRERR (Write ERRor), est mis à 1 en cas d'erreur d'écriture.
· Le bit EEIF, comme EEPROM Interrupt Flag, est mis à 1 quand l'écriture d'une donnée est terminée. Ce bit doit être remis à 0 par le programme.
* Registre STATUS
Le registre STATUS, ou registre d'état d'adresse 03, que nous allons détailler plus particulièrement, est décrit tableau 7.
| Bit 7 |
Bit 6 |
Bit 5 |
Bit 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
| IRP |
RP1 |
RP0 |
TO |
PD |
Z |
DC |
C |
| Tableau 7 : Registre STATUS. |
|||||||
· Le bit C (Carry), est mis à 1 lors d'opérations avec retenue. Ce bit est également utilisé par les instructions de rotation.
· Le bit DC (Digit Carry), est mis à 1 quand une retenue apparaît après le bit 3.
· Le bit Z (Zero), est mis à 1 quand un résultat arithmétique ou logique est nul.
· Le bit PD (Power Down), est mis à 1 lors de la mise sous tension ou lors de l'exécution de CLRWDT. Ce bit est mis à 0 par l'instruction SLEEP.
· Le bit TO (Time Out), est mis à 1 lors de la mise sous tension ou lors de l'exécution des instructions CLRWDT et SLEEP. Ce bit est mis à 0 si le timer chien de garde déborde.
· Le bit RP0 sert à sélectionner la page des registres:
- RP0 à 0 : page 0 active, il est alors possible d'accéder aux registres d'adresse 00 à 4F ;
- RP0 à 1 : page 1 active, il est alors possible d'accéder aux registres d'adresse 80 à CF.
Les registres qui figurent dans les deux pages sont accessibles quel que soit l'état du bit RP0 Les bits RP1et IRP ne sont pas utilisés par le 16F84 et il est conseillé de les laisser à 0.
* Registre de travail W (Working register) et Unité Arithmétique et Logique (ALU)
Le registre de travail est l'équivalent des accumulateurs des microcontrôleurs classiques. C'est à travers l'Unité Arithmétique et Logique que s'effectuent les opérations arithmétiques et booléennes entre les données d'un registre et le registre de travail W. Le registre de travail n'est pas adressable comme les autres registres. Dans les opérations à deux opérandes, un opérande est dans le registre W, l'autre est une constante ou est contenu dans un autre registre. Dans les opérations à un opérande, l'opérande est soit dans W, soit dans un autre registre. Les valeurs des bits C, DC et Z du registre d'état sont affectées selon les opérations effectuées par l'ALU.
5.4- Le mot de configuration
Une partie des fonctionnalités du PIC est contrôlée par les bits du mot de configuration d'adresse 2007, décrit tableau 8.
| Bit 13 à 4 |
Bit 3 |
Bit 2 |
Bit 1 |
Bit 0 |
| CP |
PWRTE |
WDTE |
FOSC1 |
FOSC0 |
| Tableau 8 : Mot de configuration. |
||||
· Les bits CP (Code Protection), mis à 1 protègent le PIC en lecture.
· Le bit PWRTE (Power-up Timer Enable), mis à 1 active le Power-up timer et génère un délai de 72 ms après un Reset, permettant éventuellement à la tension VDD d'atteindre un niveau acceptable.
· Le bit WDTE (WatchDog Timer Enable), mis à 1 active le chien de garde.
· Les bits FOSCl et FOSC0 sont positionnés selon le type d'horloge externe choisie:
- 11 : oscillateur RC ;
- 10 : oscillateur quartz haute vitesse (4 à 20 MHz);
- 01 : oscillateur quartz standard (centaines de KHz à 4 MHz);
- 00 : oscillateur quartz basse consommation (centaines de KHz).
6- Le brochage du PIC 16F84
Ce microcontrôleur se présente sous la forme d'un boîtier DIL à 18 broches comme schématisé figure 5.
Figure 5 : Brochage du PIC 16F84.
- RA0 à RA4/TOCKI sont les pattes d'entrées/sorties du portA. RA4/TOCKI est commune avec l'entrée d'horloge externe du timer 0.
- RB0/INT à RB7 sont les pattes d'entrées/sorties du port B. RB0/INT est commune avec l'entrée d'interruption externe.
- Individuellement, chaque broche des ports A et B ne peut débiter plus de 20 mA ou absorber plus de 25 mA. Le total des intensités débitées par le port A ne peut dépasser 50 mA et par le port B, 100 mA. Le total des intensités absorbées par le port A ne peut dépasser 80 mA et par le port B, 150 mA.
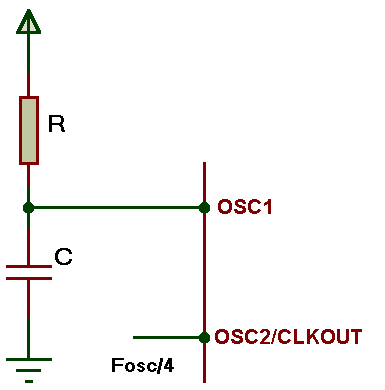
OSC1/CLOCKIN et OSC2/CLOCKOUT sont les pattes d'horloges. Plusieurs types d'horloges peuvent être utilisés: externe, à quartz ou à circuit RC. La figure 6 (a, b et c) montre les schémas de câblage en version RC et quartz. L'oscillateur à quartz présente une meilleure précision que l'oscillateur RC.
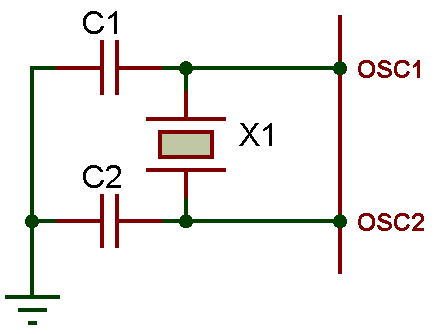
a : Oscillateur à Quartz.
b : Horloge externe.
c : Oscillateur RC
Figure 6 : Schémas du câblage de l'oscillateur.
- La fréquence de l'horloge interne du PIC est obtenue en divisant par 4 la fréquence de l'horloge externe. Pour un quartz à 4 MHz, la fréquence interne est donc de 1 MHz et la durée d'un cycle est de 1 µs.
- MCLR/VPP est la patte de Reset et d'entrée de la tension de programmation. Les circuits PIC intégrant en interne le circuit de Reset automatique à la mise sous tension, cette broche doit être reliée à la VDD en utilisation normale.
- VSS et VDD sont les pattes d'alimentation. VDD doit être compris entre 2 et 6 V en utilisation. Lors de la programmation, VDD doit être comprise entre 4,5 V et 5,5 V et VPP comprise entre 12 V et 14 V.
7- Jeu d'instructions
Le jeu d'instructions du PIC 16Fxx est présenté dans les tableaux, 9 (opérations sur des octets), 10 (opérations sur des bits) et 11(opérations de contrôle et opérations sur les littéraux).
| Mnémonique |
Opérande |
Description |
Cycles |
Bits affectés |
| ADDWF |
f,d |
Add W and F |
1 |
C, DC, Z |
| ANDWF |
f,d |
AND W with f |
1 |
Z |
| CLRF |
f |
Clear f |
1 |
Z |
| CLRW |
Clear W |
1 |
Z |
|
| COMF |
f,d |
Complement f |
1 |
Z |
| DECF |
f,d |
Decrement f |
1 |
Z |
| DECFSZ |
f,d |
Decrement f, Skip if 0 |
1(2) |
|
| INCF |
f,d |
Increment f |
1 |
Z |
| INCFSZ |
f,d |
Increment f, Skip if 0 |
1(2) |
|
| IORWF |
f,d |
Inclusive OR W with f |
1 |
Z |
| MOVF |
f,d |
Move f |
1 |
Z |
| MOVWF |
f |
Move W to f |
1 |
|
| NOP |
No Operation |
1 |
||
| RLF |
f,d |
Rotate Left throogh Carry |
1 |
C |
| RRF |
f,d |
Rotate Right throogh Carry |
1 |
C |
| SUBWF |
f,d |
Subtract W from f |
1 |
C, DC, Z |
| SWAPF |
f,d |
Swap nibbles in f |
1 |
|
| XORWF |
f,d |
Exclusive OR W with f |
1 |
Z |
Tableau 9 : Opérations sur des octets.
| Mnémonique |
Opérande |
Description |
Cycles |
Bits affectés |
| BCF |
f,b |
Bit Clear f |
1 |
|
| BSF |
f,b |
Bit Set f |
1 |
|
| BTFSC |
f,b |
Bit Test f, Skip if Clear |
1(2) |
|
| BTFSS |
f,b |
Bit Test f, Skip if Set |
1(2) |
Tableau 10 : Opérations des bits.
| Mnémonique |
Opérande |
Description |
Cycles |
Bits affectés |
| ADDLW |
K |
Add literal and W |
1 |
C, DC, Z |
| ANDLW |
K |
AND literal and W |
1 |
Z |
| CALL |
K |
Call subroutine |
1 |
|
| CLRWDT |
Clear Watchdog Timer |
1 |
TOn, PDn |
|
| GOTO |
K |
Goto adress |
1(2) |
|
| IORLW |
K |
Inclusive OR literal with W |
1(2) |
|
| MOVLW |
K |
Move literal to W |
1 |
Z |
| RETFIE |
Return from interrupt |
1 |
Z |
|
| RETLW |
K |
Return with literal in W |
1 |
Z |
| RETURN |
Return from subroutine |
1 |
Z |
|
| SLEEP |
Go into standby mode |
1(2) |
TOn, PDn |
|
| SUBLW |
K |
Subrtract W from literal |
1(2) |
|
| XORLW |
K |
Exclusive OR literal with W |
1 |
Z |
Tableau 11 : Opérations de contrôle et opérations sur les littéraux.
Si le PC est modifié ou si un test est vrai, l'instruction dure 2 cycles.
Notations :
f
d
K
b
Registre (File Register).
Destination de l'opération ( W si d=0 ou f si d=1).
Valeur immédiate (Literal value).
Position du bit dans l'octet.
À titre d'exemple, les listings 1 et 2 montrent deux programmes types de lecture et d'écriture en assembleur.
Liste des mnémoniques
addlw k ;ajoute une constante k à W. Résultat dans W addwf f,d ;ajoute W à f. Résultat dans W si d=0 ou dans f si d=1 andlw k ;effectue un ET entre une la constante k et W. Résultat dans W andwf f,d ;effectue un ET entre W et f. Résultat dans W si d=0 ou dans f si d=1 bcf f,b ;fait passer le bit b de f à 0 bsf f,b ;fait passer le bit de f à 1 btfsc f,b ;teste le bit b de f. Incrémente PC si b=0 btfss f,b ;teste le bit b de f. Incrémente PC si b=1 call k ;empile PC et affecte PC de l'adresse d'un sous programme clrf f ;place zero dans f clrw ;place zero dans W et fait passer STATUS.Z à 1 clrwdt ;initialise le timer du chien de garde comf f,d ;complemente f à 1. Résultat dans W si d=0 ou dans f si d=1 decf f,d ;décrémente f. Résultat dans W si d=0 ou dans f si d=1 decfsz f,d ;décrémente f. Si f=0, incrémente PC. Résultat dans W ou dans f goto k ;charge une adresse dans PC incf f,d ;incrémente F incfsz f,d ;inrémente f. Résultat dans W si d=0 ou dans f si d=1 iorlw k ;effectue un OU entre une constante et W iorwf f,d ;effectue un OU entre W et f. Résultat dans W si d=0 ou dans f si d=1 movf f,d ;si d=0, écrit f dans W , sinon réécrit f dans f rlf f,d ;effectue une rotation de bits à gauche à travers Carry rrf f,d ;effectue une rotation de bits à droite à travers Carry sleep ;fait passer le PIC en mode veille sublw k ;sustrait W de d'une constante k ( W := k-W ) subwf f,d ;soustrait W de f. Résultat dans W si d=0 ou dans f si d=1 swapf f,d ;permute les deux quartets de f. Résultat dans W si d=0 ou dans f si d=1 xorlw k ;effectue un OU exclusif entre une constante et W. Resultat dans W xorwf f,d ;OU exclusif entre W et f. Résultat dans W si d=0 ou dans f si d=1 const ;est obsolète : ne plus l'utiliser Le listing 1 lit la donnée située dans l'EEPROM à l'adresse ADRESSE et la place dans le registre de travail W.
MOVLW ADRESSE ; adresse de la donnée dans W MOVWF EEADR ; adresse mise dans EEADR BSF STATUS, RP0 ; page 1 BSF EECONl, RD ; pour opération de lecture BCF STATUS, RP0 ; page 0 MOVF EEDATA,W ; la donnée lue est dans W Programme type de lecture
Le listing 2 écrit la donnée DONNEE dans l'EEPROM à l'adresse ADRESSE, Les six dernières lignes d'instructions, précisées dans la documentation anglaise du PIC, sont nécessaires pour le bon déroulement de l'opération d'écriture.
BSF STATUS, RPO ; page 1 BCF INTCON, GIE ; annule les interruptions BSF EECDN1, WREN; autorise écriture MOVLW H' 55'; 55 dans W MOVWF EECON2; 55 dans EECON2 MOVLW H'AA'; AA dans W MOVWF EECON2; AA dans EECON2 BSF EECON1, WR; écriture de la donnée à l'adresse précisée BSF INTCDN, GIE ; autorise 1es interruptions Programme type d'écriture