
More Website
Templates @ Templates.com!
Réponses
Vrai
Faux
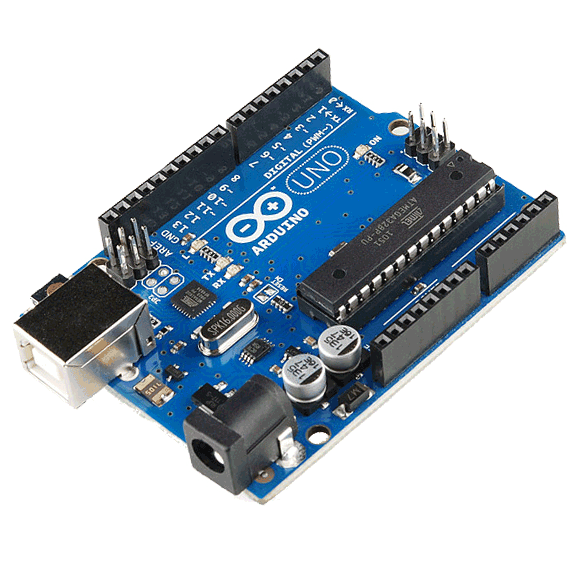
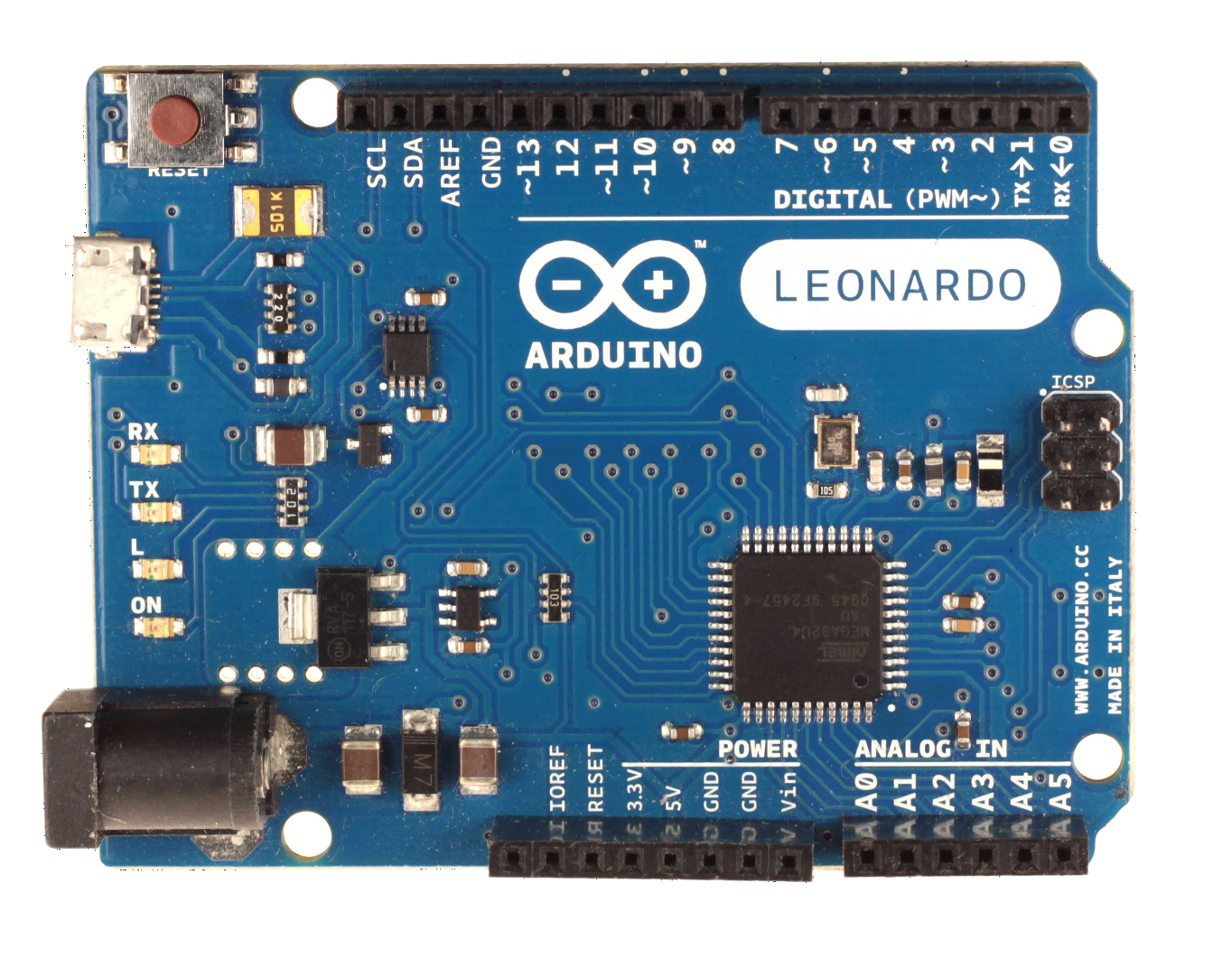
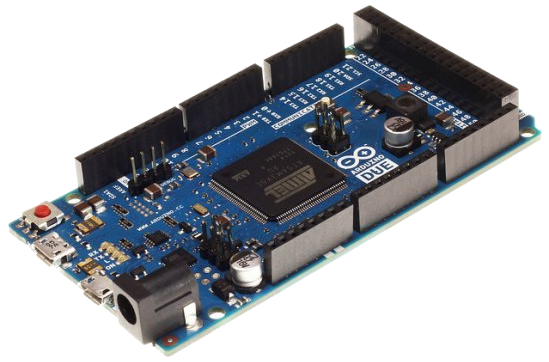
- Quel est le microcontrôleur utilisé sur l’Arduino Uno ?
Faux
- Quel est le microcontrôleur utilisé sur l’Arduino Uno ?
ATmega328
ATmega32u4
ATmega2560
ATmega168
ATmega32u4
ATmega2560
ATmega168
Vrai
Faux
Faux
pinMode(5,
INPUT);
pinMode(5, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(5, HIGH);
pinMode(5, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(5, HIGH);
160Ohms
170Ohms
180Ohms
170Ohms
180Ohms
Vrai
Faux
Faux
Environ
1.2 mV
Environ 2.5 mV
Environ 4.9 mV
Environ 20 mV
Environ 2.5 mV
Environ 4.9 mV
Environ 20 mV
void setup(){
pinMode(13,OUTPUT);
}void loop(){
digitalWrite(13,HIGH);
delay(250);
digitalWrite(13,LOW);
delay(750);
}
Il allume la LED 13 durant 250 centièmes de seconde et l'éteint durant 750 centièmes de seconde, une seule fois.
ll allume la LED 13 durant ¼ de seconde et l'éteint durant ¾ de seconde, répété à l'infini
Il allume la LED 13 durant ¼ de seconde et l'éteint durant ¾ de seconde, une seule fois
ll allume la LED 13 durant 250 centièmes de seconde et l'éteint durant 750 centièmes de seconde, répété à l'infini.
Il ne fonctionne pas car il contient une erreur
ll allume la LED 13 durant ¼ de seconde et l'éteint durant ¾ de seconde, répété à l'infini
Il allume la LED 13 durant ¼ de seconde et l'éteint durant ¾ de seconde, une seule fois
ll allume la LED 13 durant 250 centièmes de seconde et l'éteint durant 750 centièmes de seconde, répété à l'infini.
Il ne fonctionne pas car il contient une erreur
Obligatoirement connecter les 3 câbles du servo sur la carte
Connecter uniquement le fil de commande, le reste pouvant être alimenté par une pile ou un générateur externe
Connecter le fil de commande et vérifier que le générateur externe, le servo-moteur et la carte Arduino partagent le même ground
Connecter uniquement le fil de commande, le reste pouvant être alimenté par une pile ou un générateur externe
Connecter le fil de commande et vérifier que le générateur externe, le servo-moteur et la carte Arduino partagent le même ground
Servo serv;
void setup(){
serv.attach(3);
}
void loop(){
serv.write(0);
delay(2000);
serv.write(179);
delay(2000);
} Il positionne le servo à 0°, attend 20 secondes puis le positionne à 179° et attend 20 secondes. Il répète cette action à l'infini.
Il positionne le servo à 0°, attend 2 secondes puis le positionne à 179° et attend 2 secondes. Il répète cette action à l'infini.
Il positionne le servo à 0°, attend 200 millisecondes puis le positionne à 179° et attend 200 millisecondes. Il répète cette action à l'infini.
Il ne fait rien car il contient une erreur.(il fallait ajouter #include
Il positionne le servo à 0°, attend 2 secondes puis le positionne à 179° et attend 2 secondes. Il répète cette action à l'infini.
Il positionne le servo à 0°, attend 200 millisecondes puis le positionne à 179° et attend 200 millisecondes. Il répète cette action à l'infini.
Il ne fait rien car il contient une erreur.(il fallait ajouter #include