Commander un robot Arduino par Bluetooth (exemple complet)
| Catégorie : Réalisation de cartes électroniques | Mise à jour le : 06/02/2020 23:00 |
| Ajouté par : Technologuepro | Lectures : 63344 |
| Commentaires : 0 [ Poster un commentaire ] | Note : Non évalué |
|
On se propose dans cet article dans montage électronique de réaliser un robot à base de la carte Arduino commandé par application mobile Androïde via la liaison Bluetooth avec le module HC-06. Les robots sont un sujet de d’actualité et futurisme pour les étudiants, les amateurs et les bricoleurs. Si vous êtes débutant, la construction d'un tel robot est probablement l'un des projets importants à faire après avoir appris les bases.
l’application mobile Androïde RobotBLT:
Prérequis pour construire ce Robot contrôlé par BluetoothOutre la carte Arduino Uno, qui est le principal module de contrôle du projet, il existe deux autres modules importants que vous devez connaître pour mettre en œuvre le projet Robot contrôlé par Bluetooth. Il s'agit du module Bluetooth HC-06 et du module pilote de moteur L298N.
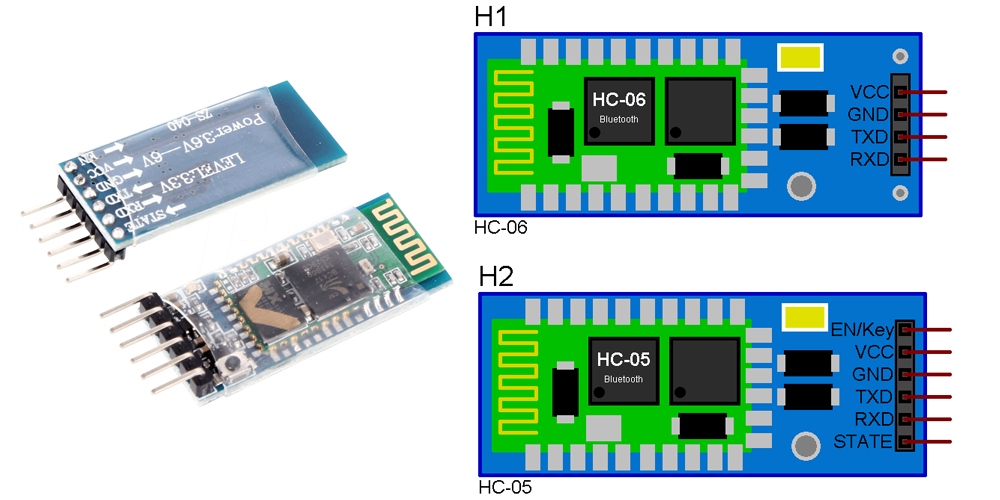
Le module Bluetooth HC-06 est chargé d'activer la communication Bluetooth entre la carte Arduino et le téléphone Android. Pour plus d'informations sur le module Bluetooth HC-06, reportez-vous au Datasheet du constructeur Module L298N Motor Driver
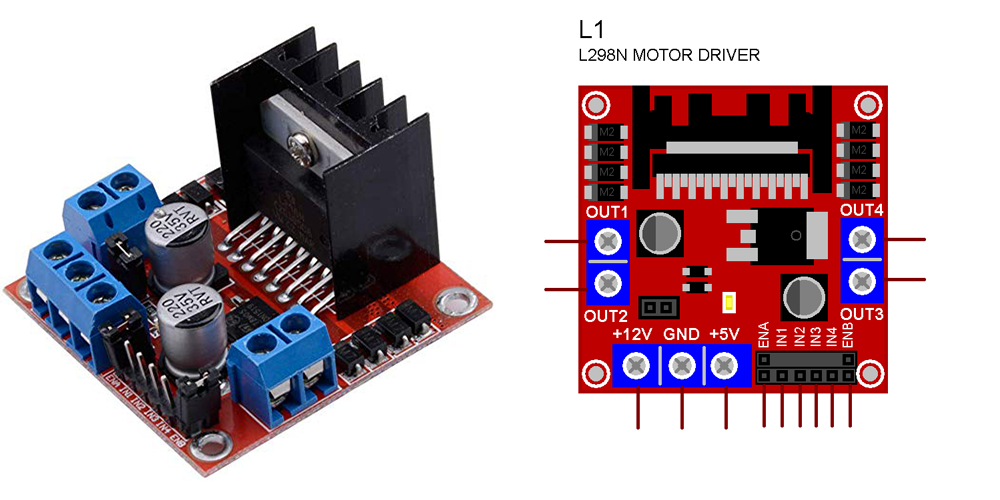
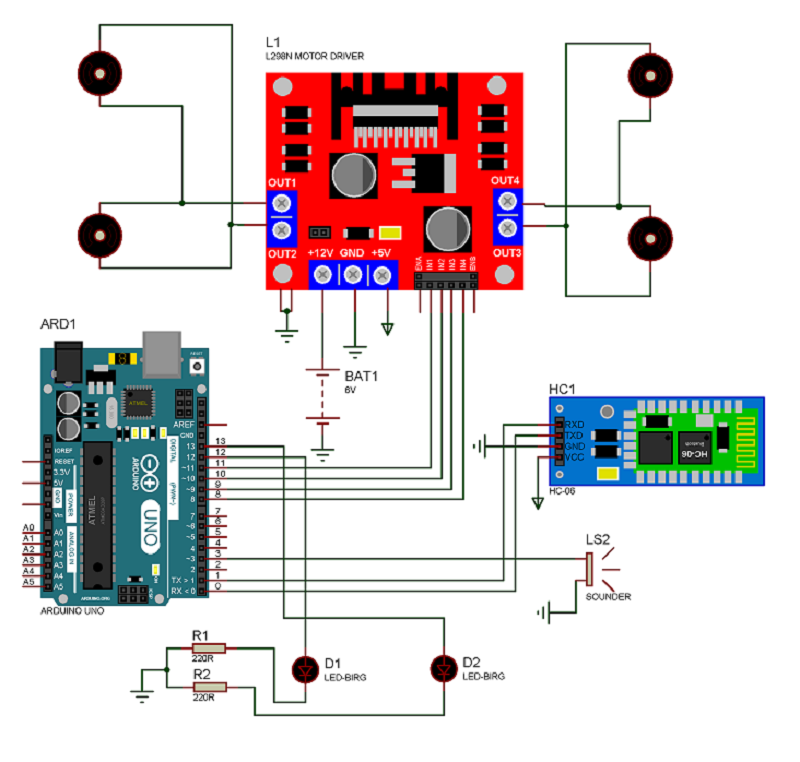
Le module de commande de moteur L298N est chargé de fournir le courant d'entraînement nécessaire aux moteurs de la voiture robotique. Référez-vous à ce lien pour plus d'informations sur les ponts en H. Schéma électronique du robotCe robot est équipé essentiellement de quatre roues avec motoréducteur (moteur électrique DC + réducteur) qu'on trouve facilement sur le marché à un prix très raisonnable. Ces 4 moteurs sont commandés par un pont en H qui est dans notre cas le fameux Module L289. Ce qui suit est le schéma de circuit du robot contrôlé par Bluetooth utilisant Arduino, L298N et HC-06. Veuillez télécharger les bibliothèques des composants dans ce schéma dans le lien suivant :
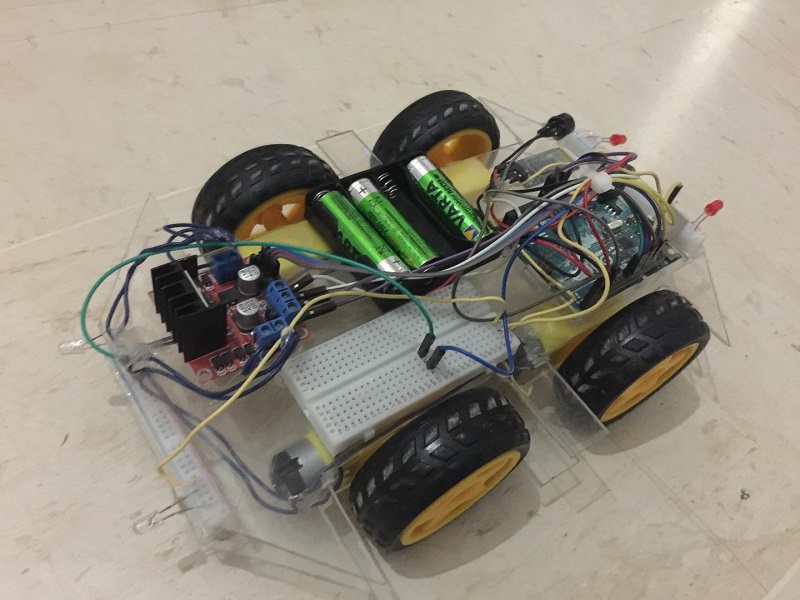
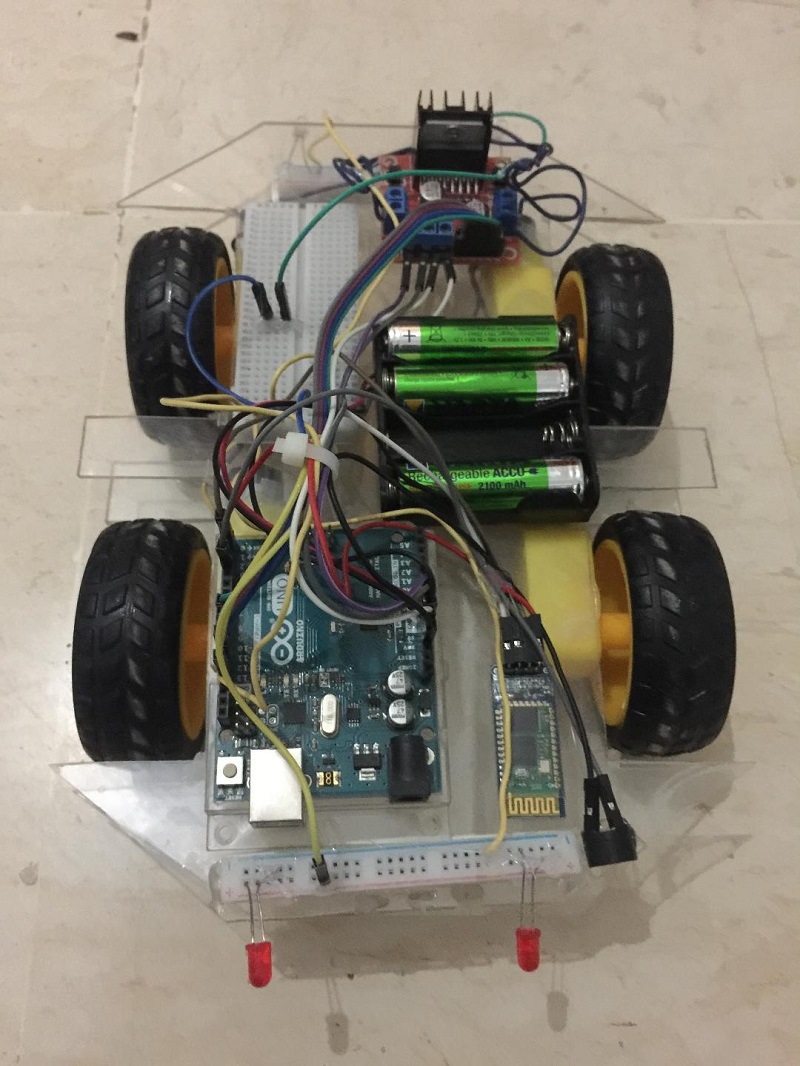
Composants requis REMARQUE: j'ai utilisé le module pilote de moteur L298N pour entraîner les moteurs du robot. Vous pouvez utiliser celui-ci ou le module pilote de moteur L293D. Si vous utilisez L293D, vérifiez les connexions. Conception du Robot :Je n'entrerais pas dans les détails de la construction du robot car votre châssis de robot pourrait être différent du mien et vous pouvez facilement comprendre comment construire le robot à partir des pièces disponibles et une gestion des câbles possible pour rendre le robot plus attrayant.
CodeLe code Arduino pour le projet de robot contrôlé par Bluetooth est donné ci-dessous. Android AppL’application androïde est réalisée par le logiciel Windev 24 le principe est très simple, essentiellement deux procédures sont à mettre en œuvre
Recherche des équipements Bluetooth (code du bouton ON):Envoie des ordres : Bouton appuyé (bouton marche avant ) Le code Arduino donné ci-dessus est écrit pour se synchroniser avec les données configurées dans l'application Bluetooth Controller. Lorsqu'une touche est enfoncée, les données correspondantes sont transmises au module Bluetooth à partir du téléphone via la communication Bluetooth. Téléchargement : Bibliothèque Arduino, L298 et HC-06 pour Proteus Application Android sur Google Play Code source de l’application Androïde (Windev 24) | |

Lectures recommandées sur ce thème :
Cours
Cours Systèmes Echantillonnés - Catégorie :
Cours Systèmes logiques 2 - Catégorie :
Cours Systèmes Robotisés - Catégorie :
Cours Les systèmes logiques séquentiels - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Automatique 1 - Catégorie : Cours Automatique
TP
TP Atelier Systèmes Robotisés - Catégorie : TP Automatisme et Informatique Industrielle
Projets fin d'études
Robot suiveur de courbe supporteur d'une camera - (26/06/2013)
Robot suiveur de ligne à base de PIC16F877 - (16/06/2013)
Robot bras manipulateur à base du PIC16F877 - (07/07/2013)
Articles
FALLEG 2, le robot militaire Tunisien - (12/11/2013)
EDUGRAF, Le Nouveau Logiciel d'Automatisme - (15/10/2012)
Falleg V1.0, un Robot RMT de deuxième génération - (13/07/2012)
Robot bras manipulateur - Le bras de SIWAN - (17/04/2011)
TUNIROBOTS'11, Journée Nationale de Robotique à l'INSAT - (15/04/2011)
Montages électroniques
Détecteur d’obstacles et distance avec Ultrason - (13/02/2013)
Variateur de Vitesse Pont H max 10A - (13/02/2013)
Carte d'interface USB - PIC18F2550: LCD, 4E/4S Numériques 1E Analogique - (22/07/2011)
Variateur de vitesse pour moteur à courant continu par PIC16F876 en MLI (PWM) 12V - (26/03/2014)
Transformez votre afficheur LCD parallèle en LCD série - (19/08/2010)
Téléchargements
EDUGRAF EDITION ETUDIANT V1.26 - (27/01/2013)
Annuaire
Schemas et réalisations électroniques - (08/08/2013)
Robot Blog - (12/12/2013)
Robot Impact - (12/12/2013)
Robopolis - (06/12/2013)
Best of Robots - (02/12/2013)
Forums
Nike air carries a unique appear - (05/05/2018)
Besoin d´aide pour la réalisation de mon robot - (28/02/2015)
Robot eviteur labyrinyhe - (09/10/2014)
l'estimation de la position d'un robot - (25/03/2014)
Utilisation d'OpenStreetMap dans une application android sous eclipse - (28/03/2013)
Commentaires
Aucun commentaire dans la base de données