Robot bras manipulateur - Le bras de SIWAN
| Catégorie : Robotique | Ajouté le : 17/04/2011 16:27 |
| Ajouté par : Technologuepro | Lectures : 47994 |
| Commentaires : 0 [ Poster un commentaire ] | Note : Non évalué |
|
Les robots sont actuellement très répandus dans l'industrie, en particulier en construction automobile et chez la plupart des fabricants d'ordinateurs. Capables d'effectuer rapidement des travaux répétitifs, ils sont notamment utilisés dans les chaines de fabrication et de montage. On les emploie également dans des environnements difficilement supportables par l'homme (conditions extrêmes de température ou de la pression, radioactivité élevée, etc...). L'industrie du nucléaire a ainsi largement contribué au développement de la robotique (notamment dans la conception de bras télémanipulateurs). Un robot est un système mécanique poly-articulé mû par des actionneurs et commandé par un calculateur qui est destiné à effectuer une grande variété de tâches.
Toute ces composants sont assemblés et fixés sur un support.
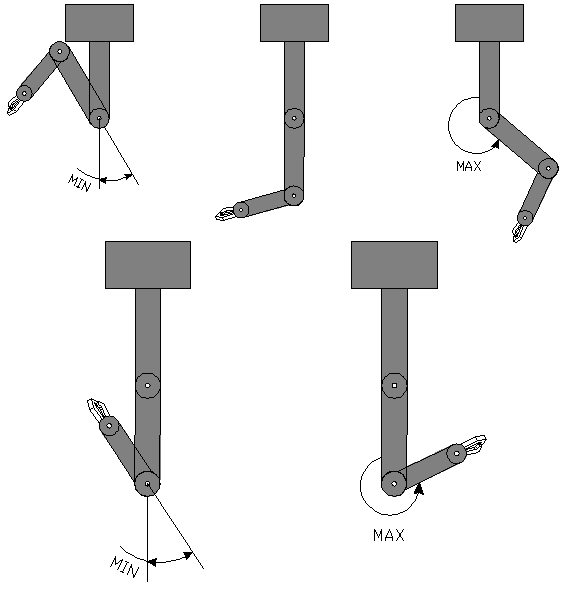
Groupe d'étudiants qui ont réalisé ce Robot Le bras manipulateur qui va être monté sur SIWAN dans sa version 3, PFE réalisé à ISET Nabeul en Tunisie pour ceux qui ne connaissent pas Siwan vous trouverez plus d'info ici : http://www.technologuepro.com/articles/robot-tunisien-SIWAN-51.html Remerciements aux étudiants : - Khlif Ahmed - Kaami Hamdi - Abid Senda - Ferchichi Hanen | |


Lectures recommandées sur ce thème :
Cours
Cours Les systèmes logiques séquentiels - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Automatique 1 - Catégorie : Cours Automatique
Cours Systèmes logiques - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Mécanique générale - Catégorie : Cours Automatisme et Informatique Industrielle
TP
TP Atelier Systèmes Robotisés - Catégorie : TP Automatisme et Informatique Industrielle
TP Câblage EIA/TIA 568A/568B - Catégorie : TP réseaux
Projets fin d'études
Robot suiveur de courbe supporteur d'une camera - (26/06/2013)
Robot suiveur de ligne à base de PIC16F877 - (16/06/2013)
Robot bras manipulateur à base du PIC16F877 - (07/07/2013)
Articles
FALLEG 2, le robot militaire Tunisien - (12/11/2013)
EDUGRAF, Le Nouveau Logiciel d'Automatisme - (16/10/2012)
Falleg V1.0, un Robot RMT de deuxième génération - (13/07/2012)
TUNIROBOTS'11, Journée Nationale de Robotique à l'INSAT - (15/04/2011)
RoboComp'2010 - (27/03/2010)
Montages électroniques
Commander un robot Arduino par Bluetooth (exemple complet) - (07/02/2020)
Détecteur d’obstacles et distance avec Ultrason - (13/02/2013)
Variateur de Vitesse Pont H max 10A - (13/02/2013)
Carte d'interface USB - PIC18F2550: LCD, 4E/4S Numériques 1E Analogique - (22/07/2011)
Variateur de vitesse pour moteur à courant continu par PIC16F876 en MLI (PWM) 12V - (26/03/2014)
Téléchargements
EDUGRAF EDITION ETUDIANT V1.26 - (28/01/2013)
Annuaire
Schemas et réalisations électroniques - (08/08/2013)
Robot Blog - (12/12/2013)
Robot Impact - (12/12/2013)
Robopolis - (06/12/2013)
Best of Robots - (02/12/2013)
Forums
Nike air carries a unique appear - (05/05/2018)
Nike SB Dunks Urban Vogue Ornament - (03/05/2018)
Besoin d´aide pour la réalisation de mon robot - (28/02/2015)
Robot eviteur labyrinyhe - (09/10/2014)
l'estimation de la position d'un robot - (25/03/2014)
Commentaires
| [email protected] |