|
| |||
| Catégorie : PFE | ||||
| Mise à jour le : 26/06/2013 12:03 | ||||
| Ajouté par : Technologuepro | ||||
| Lectures : 98453 | ||||
| Commentaires : 10 [ Poster un commentaire ] | ||||
| Note : | ||||
 Ce prjet consiste à réaliser un support de la caméra (Robot) qui se déplace selon des courbes mathématiques données par l’ordinateur. Donc le scénario sera traduit par des courbes bien déterminées, la caméra sera supportée par un robot et par la suite on réduit le maximum le nombre de répétition lors de l’enregistrement audiovisuel due aux fautes humaines. 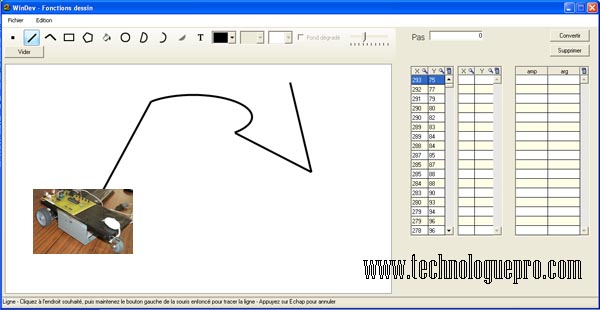 Des courbes mathématiques vers le plan de travail: Déterminer les coordonnées cartésiennes. Calculer le module et l’argument. Transformer les distances et les angles en pas. Envoyer les données. 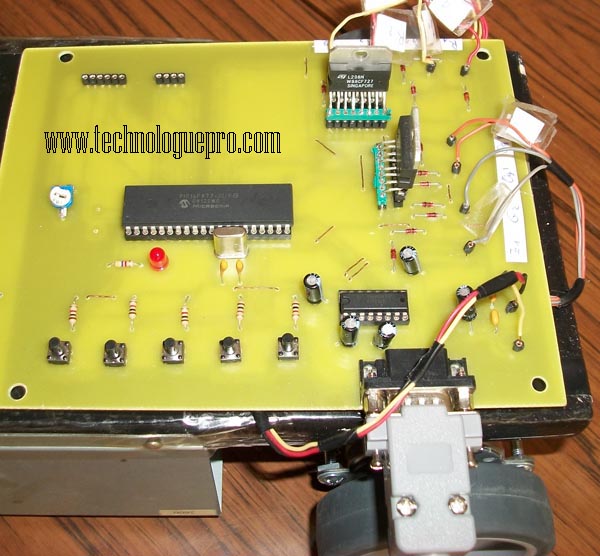 | ||||

Lectures recommandées sur ce thème :
Cours
Cours Systèmes Echantillonnés - Catégorie :
Cours Systèmes logiques 2 - Catégorie :
Cours Systèmes Robotisés - Catégorie :
Cours Les systèmes logiques séquentiels - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Automatique 1 - Catégorie : Cours Automatique
TP
TP Atelier Systèmes Robotisés - Catégorie : TP Automatisme et Informatique Industrielle
Projets fin d'études
Robot suiveur de ligne à base de PIC16F877 - (16/06/2013)
Robot bras manipulateur à base du PIC16F877 - (07/07/2013)
Articles
FALLEG 2, le robot militaire Tunisien - (12/11/2013)
EDUGRAF, Le Nouveau Logiciel d'Automatisme - (15/10/2012)
Falleg V1.0, un Robot RMT de deuxième génération - (13/07/2012)
Robot bras manipulateur - Le bras de SIWAN - (17/04/2011)
TUNIROBOTS'11, Journée Nationale de Robotique à l'INSAT - (15/04/2011)
Montages électroniques
Commander un robot Arduino par Bluetooth (exemple complet) - (06/02/2020)
Détecteur d’obstacles et distance avec Ultrason - (13/02/2013)
Variateur de Vitesse Pont H max 10A - (13/02/2013)
Carte d'interface USB - PIC18F2550: LCD, 4E/4S Numériques 1E Analogique - (22/07/2011)
Variateur de vitesse pour moteur à courant continu par PIC16F876 en MLI (PWM) 12V - (26/03/2014)
Téléchargements
EDUGRAF EDITION ETUDIANT V1.26 - (27/01/2013)
Annuaire
Schemas et réalisations électroniques - (08/08/2013)
Robot Blog - (12/12/2013)
Robot Impact - (12/12/2013)
Robopolis - (06/12/2013)
Best of Robots - (02/12/2013)
Forums
Nike air carries a unique appear - (05/05/2018)
Besoin d´aide pour la réalisation de mon robot - (28/02/2015)
Robot eviteur labyrinyhe - (09/10/2014)
l'estimation de la position d'un robot - (25/03/2014)
Utilisation d'OpenStreetMap dans une application android sous eclipse - (28/03/2013)
Commentaires
| merci |
| ahmed_tech asalam chokranne jazilan BR |
| elphenyx goooood, c'est un projet intéressant Allah ybarek |
| Excellent travail |
| tilk PFE très intéressant, j'espère voir des amélioration dans des versions futures @+ |
| Excellent |
| mohamedeln merci |
| samih-she slt ;j'ai réalise cette robot ;elle est fonctione maniuall (botton ) mais par pc rien ,asq le prb dans pc ou logiçial windev14 ......???? |
| tres bien |
| jijel_2007 merci beacoup |
| aide pour mon pfe |
| marimar1915 bjr svp j'ai un pfe à propos de simulateur de présence et j 'ai besoin d'un aide au niveau de sa programmation j ai fait le schéma sur isis et la j me bloque merci d'avance |
| besoin d aide |
| aminedynam salut j ai arrive a réaliser le projet de robot suiveur de courbe a base de pic 16f877 et j ai un petit soucis je c pas comment envoyer le schéma de la courbe depuis l'application commande jointe sur le site pour le robot pour pouvoir circuler selon la courbe désirer j aimerai bien avoir une solution en urgence merci pour tout le travail c était génial |
| remerciment |
| ayour555 merci bq |
| ayachimohamed |