Détecteur d’obstacles et distance avec Ultrason
| Catégorie : Réalisation de cartes électroniques | Mise à jour le : 13/02/2013 21:00 |
| Ajouté par : Technologuepro | Lectures : 95925 |
| Commentaires : 3 [ Poster un commentaire ] | Note : |
|
Ce montage consiste à réaliser un capteur/détecteur de distance/obstacle à ultrason à base de PIC16F628 avec une portée qui peut atteindre les 2 mètres. Les ultrasons sont couramment employés en robotique et ce, afin d’effectuer des mesures de distance et/ou de détecter des objets quelconques en état statique ou en mouvement. Dans le but d’assurer un cycle autonome à notre robot nous avons eu recours à cette qualité des ultrasons tel que :
Principes de fonctionnement des ultrasons :
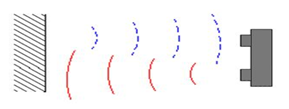
Les capteurs ultrasons fonctionnent en mesurant le temps de retour d’une onde sonore inaudible par l’homme émise par le capteur. La vitesse du son étant à peu près stable, on en déduit la distance à l’obstacle.
Les ultrasons sont des ondes infra-acoustique, qui oscillent à des fréquences supérieures au seuil acoustique.
Ceci est important à plusieurs niveaux :
 Les capteurs fournis ont souvent la forme d’une paire car il y a deux parties essentielles :
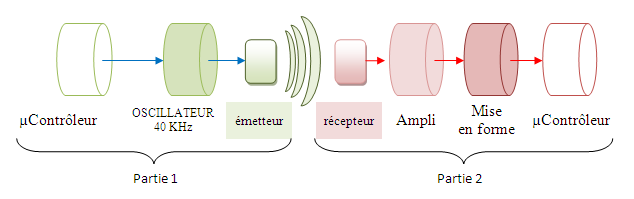 L’émetteur émet un son à une fréquence définie et le récepteur collecte le son répercuté par les obstacles. La distance aux objets est calculée par le temps mis par le son pour revenir au récepteur
- Première partie : l’émission
La fréquence du signal de l’émetteur couramment utilisé est égale à 40 KHz, sa production nécessite l’un des TIMER du microcontrôleur.
Cette fréquence n’est efficace que si l’émetteur ultrason est alimenté par une tension au moins égale à 12 V.
- Deuxième partie : la réception
Le signal fourni par le capteur a une amplitude de l'ordre de 10 mV, celle ci diminue avec la distance.
Son exploitation au niveau du microcontrôleur nécessite une amplitude de quelques volts qui varie de 0 à 5 V donc nécessite son amplification.
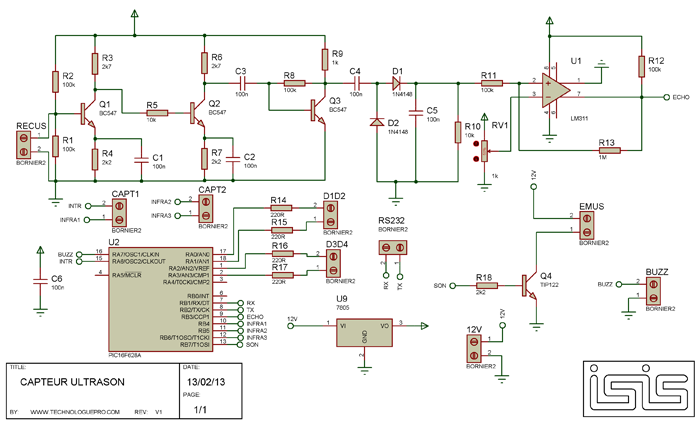
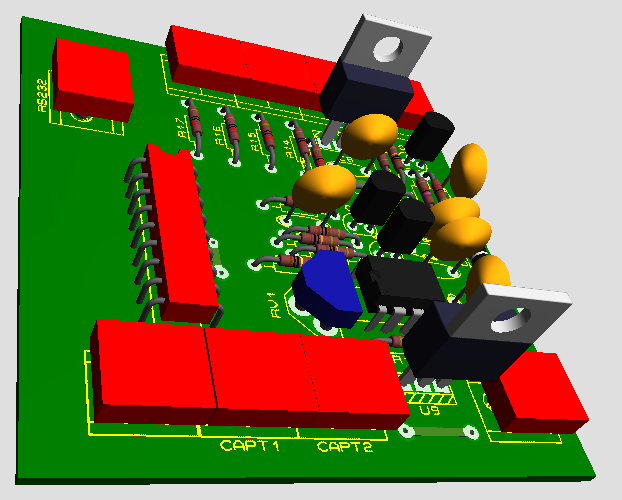
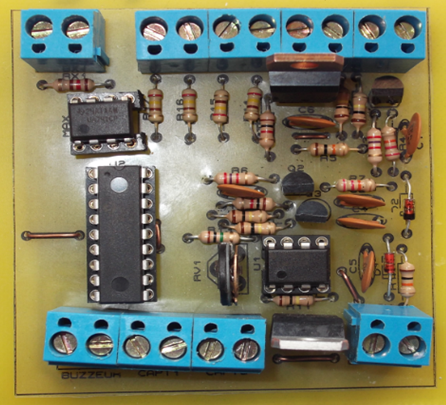
Réalisation pratique
Programme
Télechargement : | |

Lectures recommandées sur ce thème :
Cours
Cours Les automatismes industriels - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Capteurs et actionneurs en instrumentation - Catégorie : Cours Automatisme et Informatique Industrielle
Cours Microcontroleurs Architecture et Programmation - Catégorie : Cours Electronique
TP
TP Atelier Instrumentation Industrielle - Catégorie : TP Electricité
TP Atelier Systèmes Robotisés - Catégorie : TP Automatisme et Informatique Industrielle
TP Capteurs Industriels - Catégorie : TP Automatisme et Informatique Industrielle
Projets fin d'études
Manomètre digital de la pression relative - (07/07/2013)
Alarme téléphonique à base du PIC16F84A - (07/07/2013)
Articles
FALLEG 2, le robot militaire Tunisien - (12/11/2013)
PSoC : un microcontrôleur avec des Périphériques sur demande ? - (21/04/2008)
Montages électroniques
Commande des modules émetteur - récepteur hybrides TX433 et RX433 par PIC - (16/06/2010)
Téléchargements
Proteus Library Manager (Bibliothèques de composants pour Proteus) - (30/01/2020)
Régulation PID d'un four électrique par PIC16F876A - (15/11/2017)
Lecture et affichage de la température par PIC16F876 et LM35 - (13/11/2017)
Etude et réalisation d'un système de surveillance par envoi SMS - (25/06/2010)
Commande d'un capteur de température type DS1620 en Mikropascal - (13/06/2010)
Annuaire
Arobose - (02/12/2013)
Kit robot Lego Mindstorms NXT - (12/08/2013)
Forums
Programmation Arduno UNO - (03/04/2017)
Flowcode et mesure d'une temperature - (02/02/2017)
recherche de capteur de courant et de tension sur ISIS de proteus - (22/09/2016)
SUIVEUR DE SOLEIL BASE D UN CAPTEUR DE TEMPERATURE - (18/05/2016)
enregistrement des données dans un eprom externe - (06/04/2016)
Capteur LEM Urgent - (18/02/2016)
Commentaires
| rachid-aitlaassri j'ai pas bien compris ce langage de programmation est ce que il ya le programme en l*angage assembleur ?? |
| capteur us |
| E.pascal Peut on avoir + d'explications sur le fonctionnement du programme ecrit en mikrobasci |
| ouhmiz bon jour le schéma n'est pas claire.il faut bien expliquer le rôle de chaque bloque du schéma général |